 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Class-agnostic Tracking Using Feature Decorrelation in Point Clouds
Paper and Code
Mar 19, 2022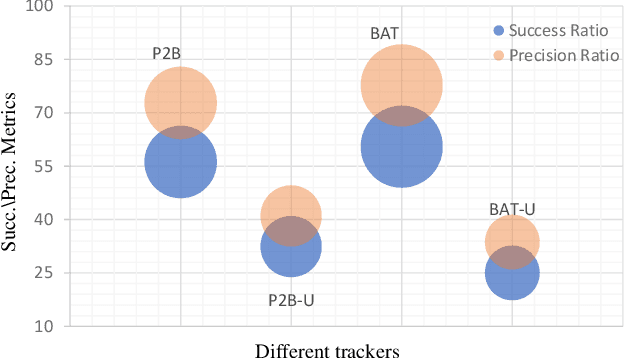
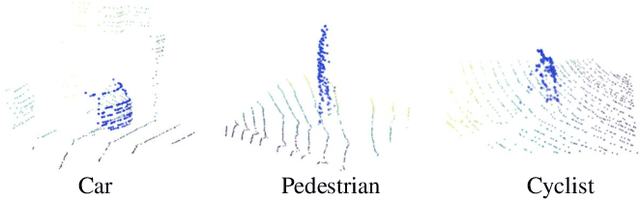
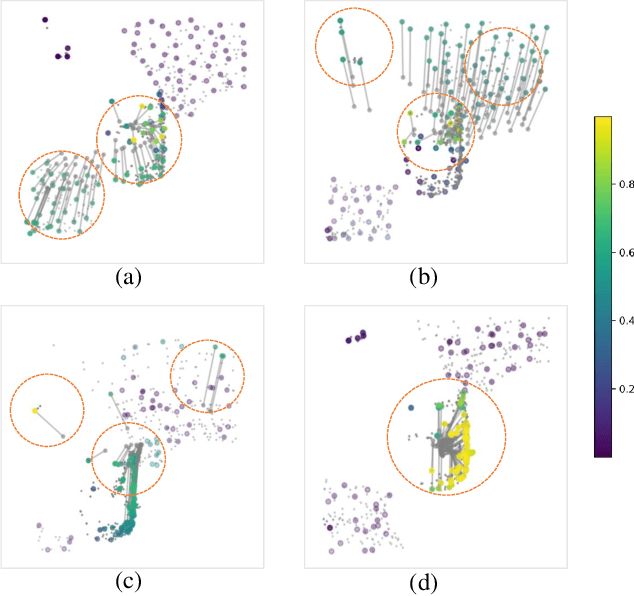
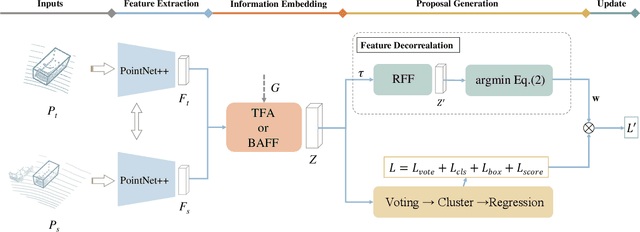
Single object tracking in point clouds has been attracting more and more attention owing to the presence of LiDAR sensors in 3D vision. However, the existing methods based on deep neural networks focus mainly on training different models for different categories, which makes them unable to perform well in real-world applications when encountering classes unseen during the training phase. In this work, we investigate a more challenging task in the LiDAR point clouds, class-agnostic tracking, where a general model is supposed to be learned for any specified targets of both observed and unseen categories. In particular, we first investigate the class-agnostic performances of the state-of-the-art trackers via exposing the unseen categories to them during testing, finding that a key factor for class-agnostic tracking is how to constrain fused features between the template and search region to maintain generalization when the distribution is shifted from observed to unseen classes. Therefore, we propose a feature decorrelation method to address this problem, which eliminates the spurious correlations of the fused features through a set of learned weights and further makes the search region consistent among foreground points and distinctive between foreground and background points. Experiments on the KITTI and NuScenes demonstrate that the proposed method can achieve considerable improvements by benchmarking against the advanced trackers P2B and BAT, especially when tracking unseen objects.