 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Autonomous Crop-Agnostic Visual Navigation in Arable Fields
Paper and Code
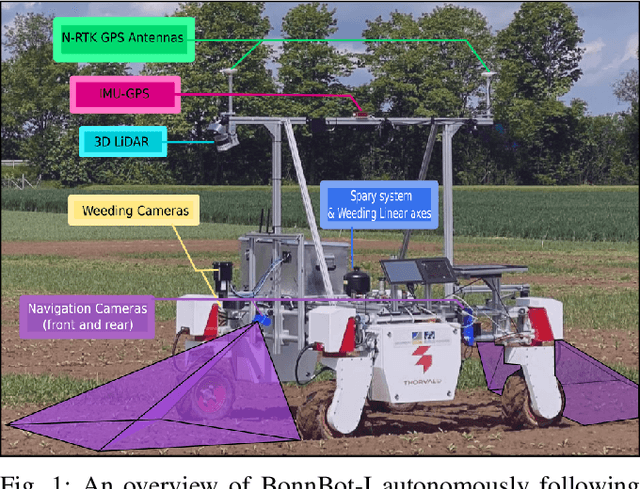
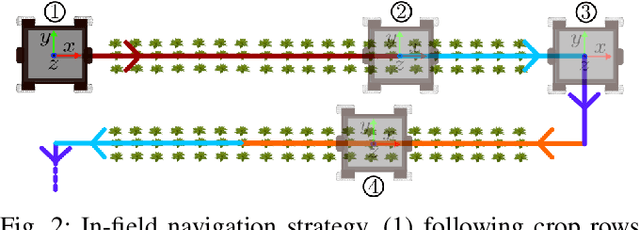
Autonomous navigation of a robot in agricultural fields is essential for every task from crop monitoring through to weed management and fertilizer application. Many current approaches rely on accurate GPS, however, such technology is expensive and also prone to failure~(e.g. through lack of coverage). As such, navigation through sensors that can interpret their environment (such as cameras) is important to achieve the goal of autonomy in agriculture. In this paper, we introduce a purely vision-based navigation scheme which is able to reliably guide the robot through row-crop fields. Independent of any global localization or mapping, this approach is able to accurately follow the crop-rows and switch between the rows, only using on-board cameras. With the help of a novel crop-row detection and a novel crop-row switching technique, our navigation scheme can be deployed in a wide range of fields with different canopy types in various growth stages. We have extensively tested our approach in five different fields under various illumination conditions using our agricultural robotic platform (BonnBot-I). And our evaluations show that we have achieved a navigation accuracy of 3.82cm over five different crop fields.