 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Automatic 3D Shape Instantiation for Deployed Stent Grafts: 2D Multiple-class and Class-imbalance Marker Segmentation with Equally-weighted Focal U-Net
Paper and Code
Jul 31, 2018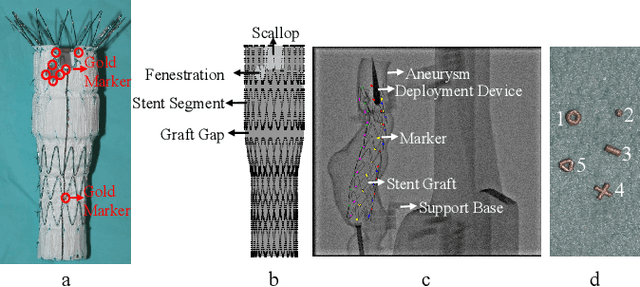
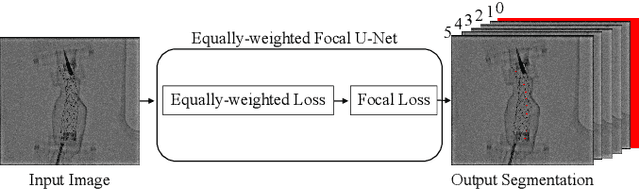
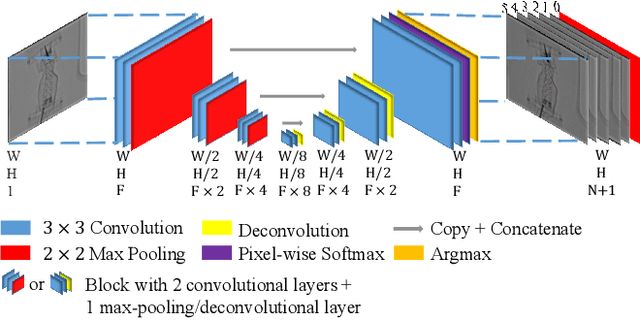

Robot-assisted Fenestrated Endovascular Aortic Repair (FEVAR) is currently navigated by 2D fluoroscopy which is insufficiently informative. Previously, a semi-automatic 3D shape instantiation method was developed to instantiate the 3D shape of a main, deployed, and fenestrated stent graft from a single fluoroscopy projection in real-time, which could help 3D FEVAR navigation and robotic path planning. This proposed semi-automatic method was based on the Robust Perspective-5-Point (RP5P) method, graft gap interpolation and semi-automatic multiple-class marker center determination. In this paper, an automatic 3D shape instantiation could be achieved by automatic multiple-class marker segmentation and hence automatic multiple-class marker center determination. Firstly, the markers were designed into five different shapes. Then, Equally-weighted Focal U-Net was proposed to segment the fluoroscopy projections of customized markers into five classes and hence to determine the marker centers. The proposed Equally-weighted Focal U-Net utilized U-Net as the network architecture, equally-weighted loss function for initial marker segmentation, and then equally-weighted focal loss function for improving the initial marker segmentation. This proposed network outperformed traditional Weighted U-Net on the class-imbalance segmentation in this paper with reducing one hyper-parameter - the weight. An overall mean Intersection over Union (mIoU) of 0.6943 was achieved on 78 testing images, where 81.01% markers were segmented with a center position error <1.6mm. Comparable accuracy of 3D shape instantiation was also achieved and stated. The data, trained models and TensorFlow codes are available on-line.