 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards an Error-free Deep Occupancy Detector for Smart Camera Parking System
Paper and Code
Aug 17, 2022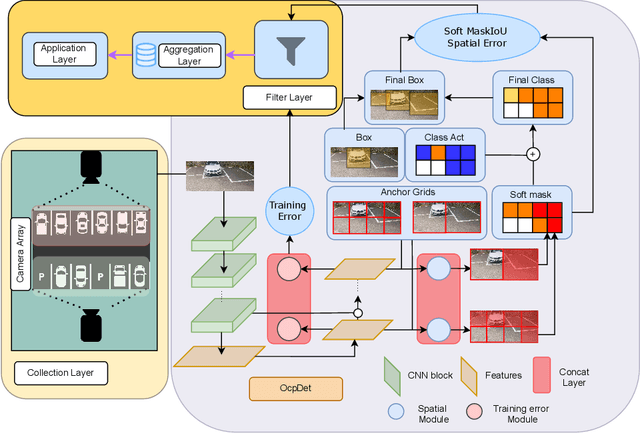

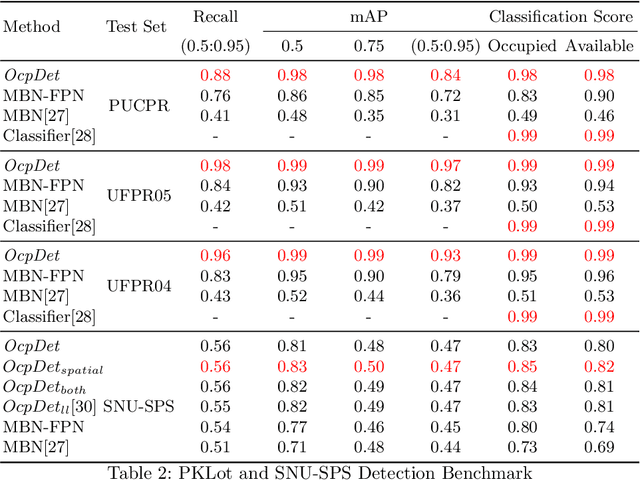
Although the smart camera parking system concept has existed for decades, a few approaches have fully addressed the system's scalability and reliability. As the cornerstone of a smart parking system is the ability to detect occupancy, traditional methods use the classification backbone to predict spots from a manual labeled grid. This is time-consuming and loses the system's scalability. Additionally, most of the approaches use deep learning models, making them not error-free and not reliable at scale. Thus, we propose an end-to-end smart camera parking system where we provide an autonomous detecting occupancy by an object detector called OcpDet. Our detector also provides meaningful information from contrastive modules: training and spatial knowledge, which avert false detections during inference. We benchmark OcpDet on the existing PKLot dataset and reach competitive results compared to traditional classification solutions. We also introduce an additional SNU-SPS dataset, in which we estimate the system performance from various views and conduct system evaluation in parking assignment tasks. The result from our dataset shows that our system is promising for real-world applications.