 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards a Framework for Visual Intelligence in Service Robotics: Epistemic Requirements and Gap Analysis
Paper and Code
Mar 13, 2020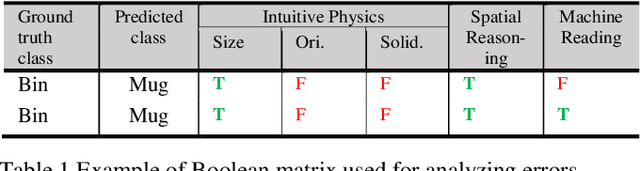
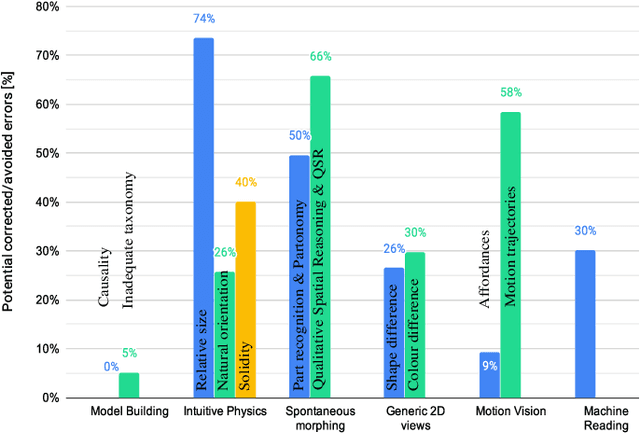
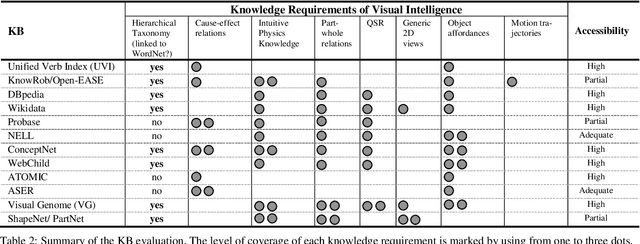
A key capability required by service robots operating in real-world, dynamic environments is that of Visual Intelligence, i.e., the ability to use their vision system, reasoning components and background knowledge to make sense of their environment. In this paper, we analyze the epistemic requirements for Visual Intelligence, both in a top-down fashion, using existing frameworks for human-like Visual Intelligence in the literature, and from the bottom up, based on the errors emerging from object recognition trials in a real-world robotic scenario. Finally, we use these requirements to evaluate current knowledge bases for Service Robotics and to identify gaps in the support they provide for Visual Intelligence. These gaps provide the basis of a research agenda for developing more effective knowledge representations for Visual Intelligence.