 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward Safety-Aware Informative Motion Planning for Legged Robots
Paper and Code
Mar 26, 2021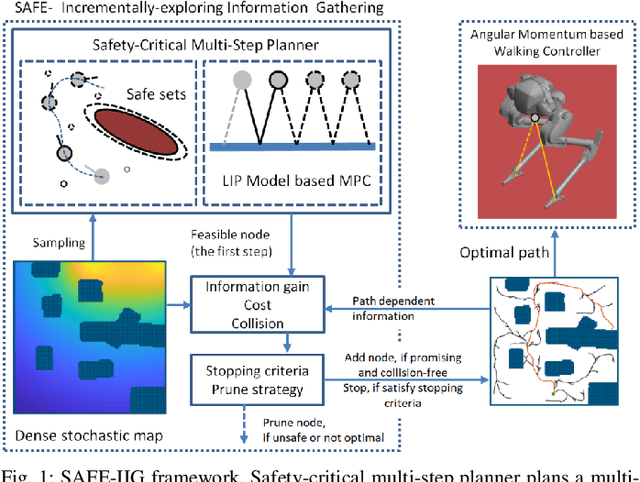
This paper reports on developing an integrated framework for safety-aware informative motion planning suitable for legged robots. The information-gathering planner takes a dense stochastic map of the environment into account, while safety constraints are enforced via Control Barrier Functions (CBFs). The planner is based on the Incrementally-exploring Information Gathering (IIG) algorithm and allows closed-loop kinodynamic node expansion using a Model Predictive Control (MPC) formalism. Robotic exploration and information gathering problems are inherently path-dependent problems. That is, the information collected along a path depends on the state and observation history. As such, motion planning solely based on a modular cost does not lead to suitable plans for exploration. We propose SAFE-IIG, an integrated informative motion planning algorithm that takes into account: 1) a robot's perceptual field of view via a submodular information function computed over a stochastic map of the environment, 2) a robot's dynamics and safety constraints via discrete-time CBFs and MPC for closed-loop multi-horizon node expansions, and 3) an automatic stopping criterion via setting an information-theoretic planning horizon. The simulation results show that SAFE-IIG can plan a safe and dynamically feasible path while exploring a dense map.