 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTogether We Rise: Optimizing Real-Time Multi-Robot Task Allocation using Coordinated Heterogeneous Plays
Paper and Code
Feb 22, 2025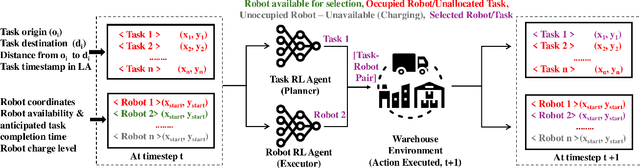

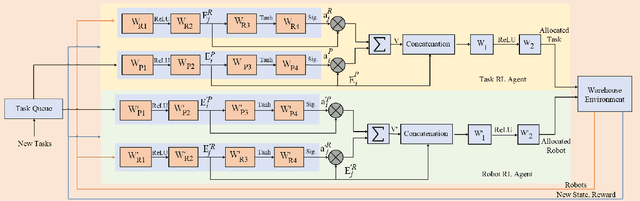

Efficient task allocation among multiple robots is crucial for optimizing productivity in modern warehouses, particularly in response to the increasing demands of online order fulfillment. This paper addresses the real-time multi-robot task allocation (MRTA) problem in dynamic warehouse environments, where tasks emerge with specified start and end locations. The objective is to minimize both the total travel distance of robots and delays in task completion, while also considering practical constraints such as battery management and collision avoidance. We introduce MRTAgent, a dual-agent Reinforcement Learning (RL) framework inspired by self-play, designed to optimize task assignments and robot selection to ensure timely task execution. For safe navigation, a modified linear quadratic controller (LQR) approach is employed. To the best of our knowledge, MRTAgent is the first framework to address all critical aspects of practical MRTA problems while supporting continuous robot movements.