 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Surprising Effectiveness of Latent World Models for Continual Reinforcement Learning
Paper and Code
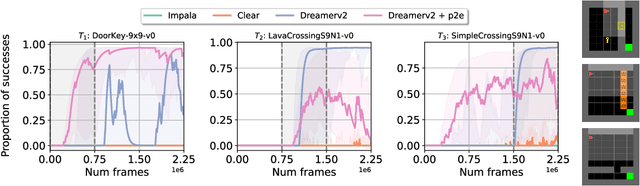
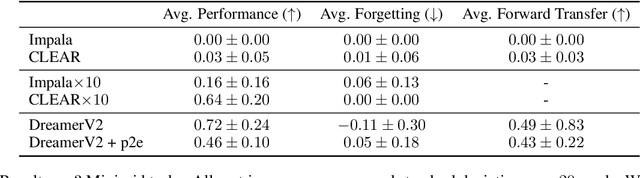
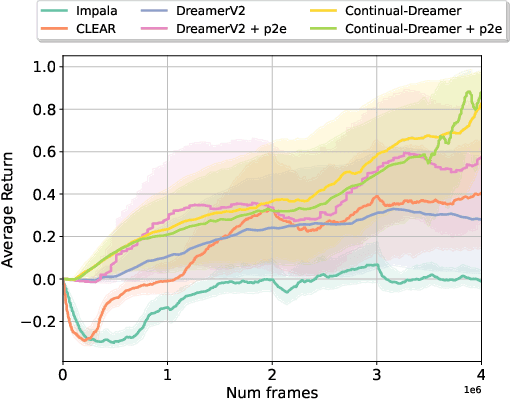

We study the use of model-based reinforcement learning methods, in particular, world models for continual reinforcement learning. In continual reinforcement learning, an agent is required to solve one task and then another sequentially while retaining performance and preventing forgetting on past tasks. World models offer a task-agnostic solution: they do not require knowledge of task changes. World models are a straight-forward baseline for continual reinforcement learning for three main reasons. Firstly, forgetting in the world model is prevented by persisting existing experience replay buffers across tasks, experience from previous tasks is replayed for learning the world model. Secondly, they are sample efficient. Thirdly and finally, they offer a task-agnostic exploration strategy through the uncertainty in the trajectories generated by the world model. We show that world models are a simple and effective continual reinforcement learning baseline. We study their effectiveness on Minigrid and Minihack continual reinforcement learning benchmarks and show that it outperforms state of the art task-agnostic continual reinforcement learning methods.