 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe role of surrogate models in the development of digital twins of dynamic systems
Paper and Code
Jan 25, 2020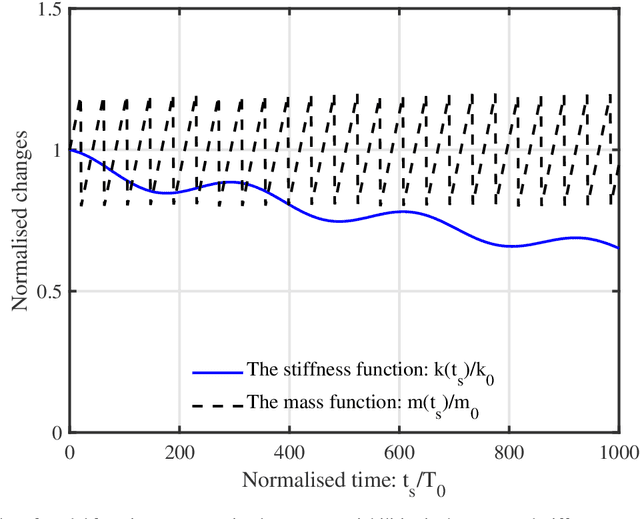

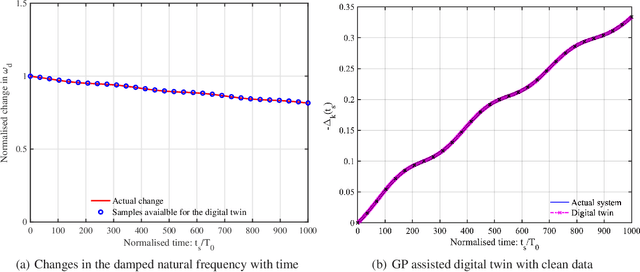
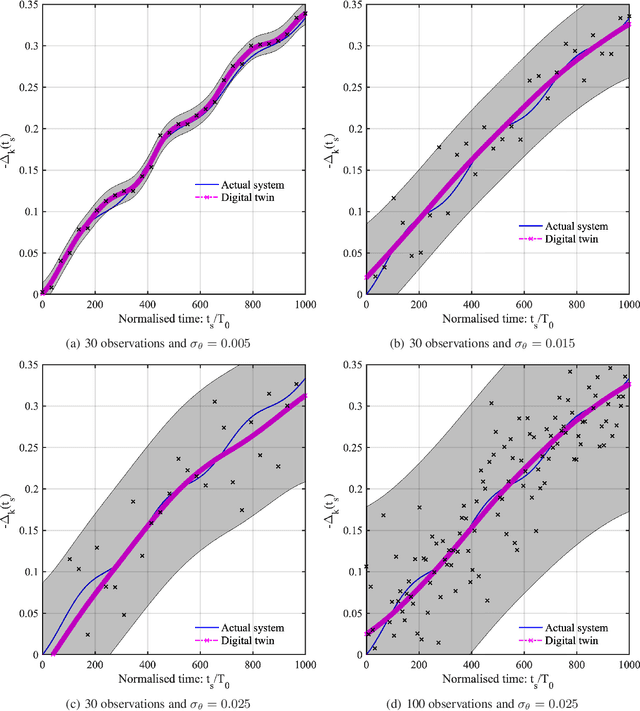
Digital twin technology has significant promise, relevance and potential of widespread applicability in various industrial sectors such as aerospace, infrastructure and automotive. However, the adoption of this technology has been slower due to the lack of clarity for specific applications. A discrete damped dynamic system is used in this paper to explore the concept of a digital twin. As digital twins are also expected to exploit data and computational methods, there is a compelling case for the use of surrogate models in this context. Motivated by this synergy, we have explored the possibility of using surrogate models within the digital twin technology. In particular, the use of Gaussian process (GP) emulator within the digital twin technology is explored. GP has the inherent capability of addressing noise and sparse data and hence, makes a compelling case to be used within the digital twin framework. Cases involving stiffness variation and mass variation are considered, individually and jointly along with different levels of noise and sparsity in data. Our numerical simulation results clearly demonstrate that surrogate models such as GP emulators have the potential to be an effective tool for the development of digital twins. Aspects related to data quality and sampling rate are analysed. Key concepts introduced in this paper are summarised and ideas for urgent future research needs are proposed.