Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Manifold Particle Filter for State Estimation on High-dimensional Implicit Manifolds
Paper and Code
Apr 25, 2016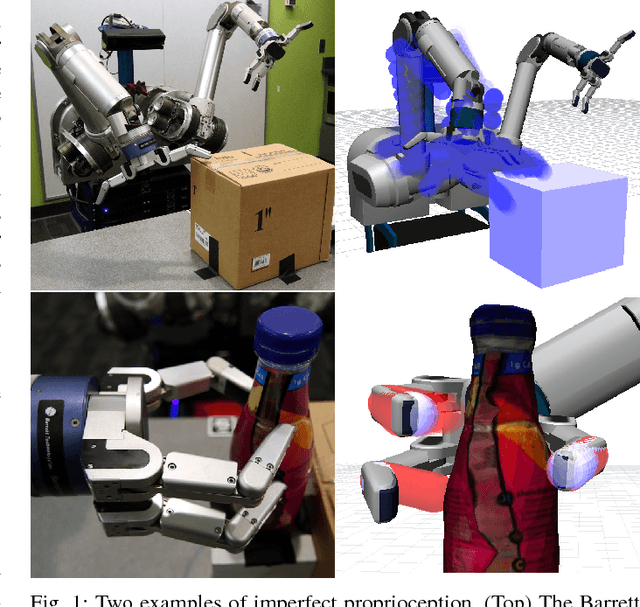
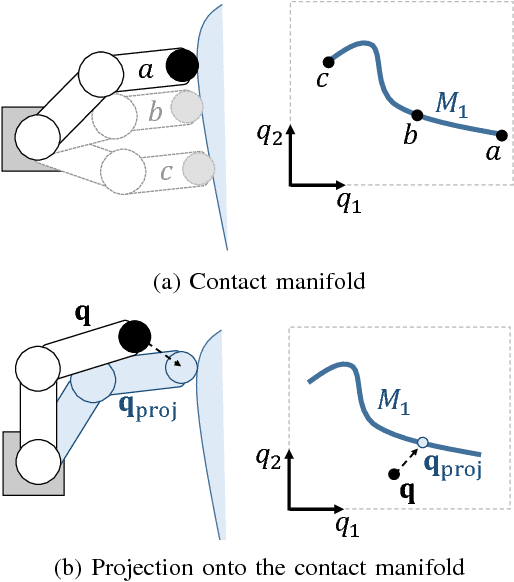
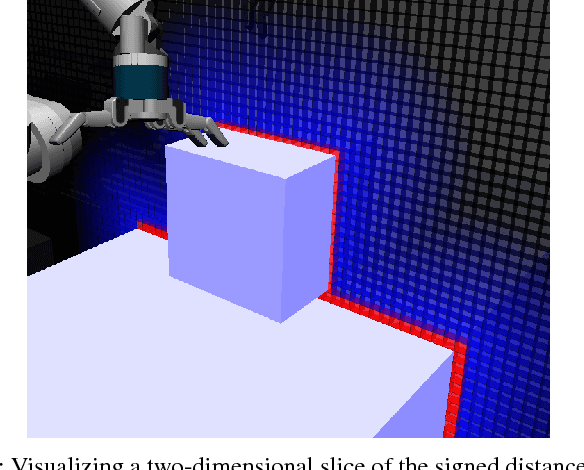
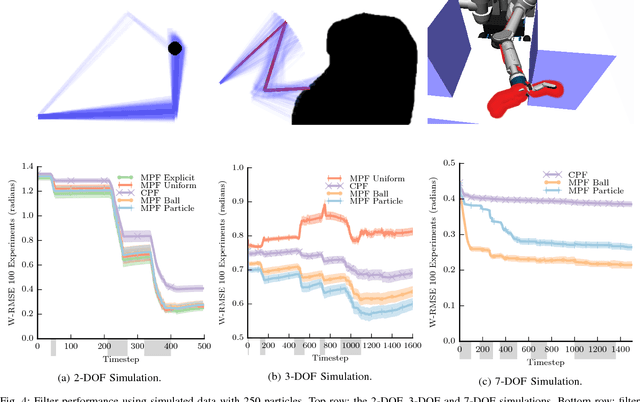
We estimate the state a noisy robot arm and underactuated hand using an Implicit Manifold Particle Filter (MPF) informed by touch sensors. As the robot touches the world, its state space collapses to a contact manifold that we represent implicitly using a signed distance field. This allows us to extend the MPF to higher (six or more) dimensional state spaces. Earlier work (which explicitly represents the contact manifold) only shows the MPF in two or three dimensions. Through a series of experiments, we show that the implicit MPF converges faster and is more accurate than a conventional particle filter during periods of persistent contact. We present three methods of sampling the implicit contact manifold, and compare them in experiments.
* 10 pages. Conference submission pre-print. Work in progress
View paper on