Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Kinematic Image of 2R Dyads and Exact Synthesis of 5R Linkages
Paper and Code
Jul 27, 2015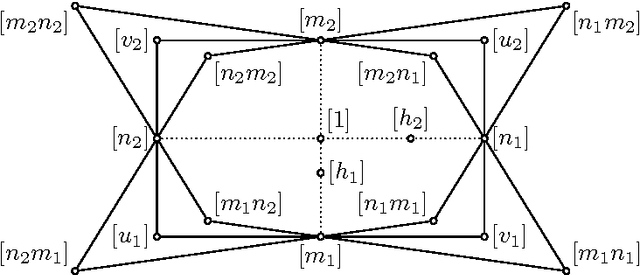
We characterise the kinematic image of the constraint variety of a 2R dyad as a regular ruled quadric in a 3-space that contains a "null quadrilateral". Three prescribed poses determine, in general, two such quadrics. This allows us to modify a recent algorithm for the synthesis of 6R linkages in such a way that two consecutive revolute axes coincide, thus producing a 5R linkage. Using the classical geometry of twisted cubics on a quadric, we explain some of the peculiar properties of the the resulting synthesis procedure for 5R linkages.
* Accepted for publication in the proceedings of the IMA Conference on
Mathematics of Robotics, Oxford, 2015
View paper on