 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe homunculus for proprioception: Toward learning the representation of a humanoid robot's joint space using self-organizing maps
Paper and Code
Sep 05, 2019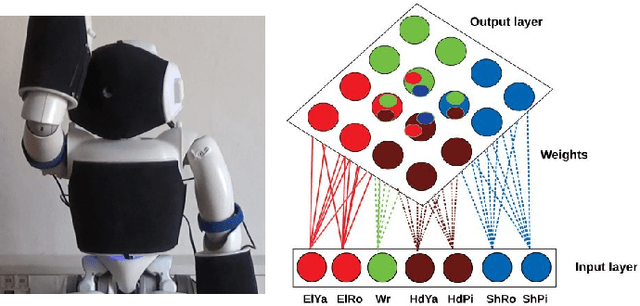
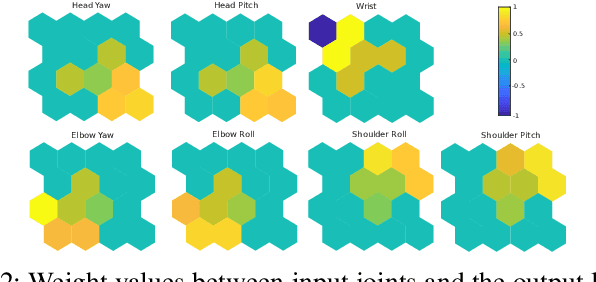
In primate brains, tactile and proprioceptive inputs are relayed to the somatosensory cortex which is known for somatotopic representations, or, "homunculi". Our research centers on understanding the mechanisms of the formation of these and more higher-level body representations (body schema) by using humanoid robots and neural networks to construct models. We specifically focus on how spatial representation of the body may be learned from somatosensory information in self-touch configurations. In this work, we target the representation of proprioceptive inputs, which we take to be joint angles in the robot. The inputs collected in different body postures serve as inputs to a Self-Organizing Map (SOM) with a 2D lattice on the output. With unrestricted, all-to-all connections, the map is not capable of representing the input space while preserving the topological relationships, because the intrinsic dimensionality of the body posture space is too large. Hence, we use a method we developed previously for tactile inputs (Hoffmann, Straka et al. 2018) called MRF-SOM, where the Maximum Receptive Field of output neurons is restricted so they only learn to represent specific parts of the input space. This is in line with the receptive fields of neurons in somatosensory areas representing proprioception that often respond to combination of few joints (e.g. wrist and elbow).