 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Globally Optimal Reparameterization Algorithm: an Alternative to Fast Dynamic Time Warping for Action Recognition in Video Sequences
Paper and Code
Jul 15, 2018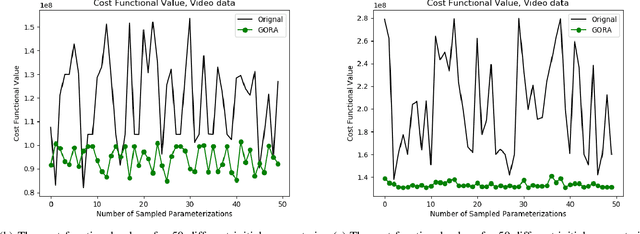
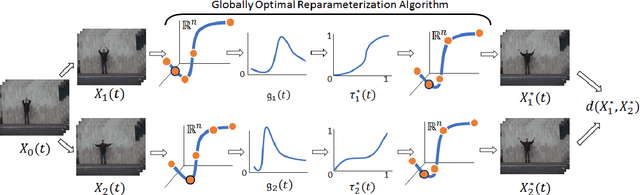
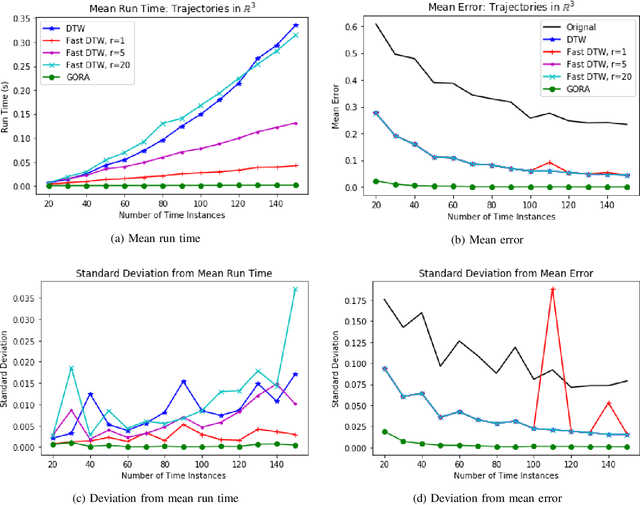
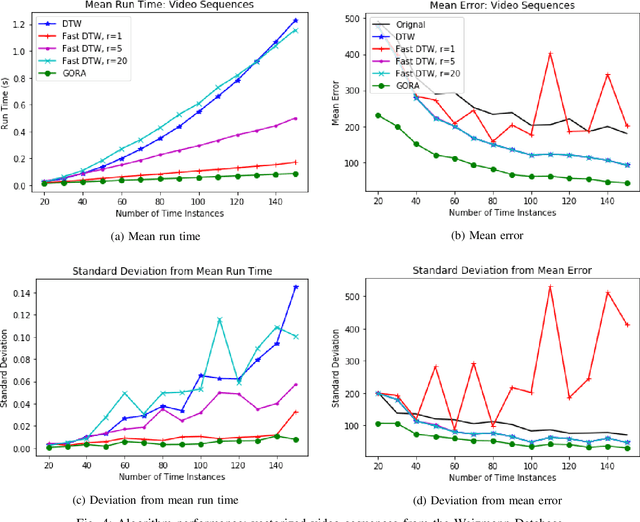
Signal alignment has become a popular problem in robotics due in part to its fundamental role in action recognition. Currently, the most successful algorithms for signal alignment are Dynamic Time Warping (DTW) and its variant 'Fast' Dynamic Time Warping (FastDTW). Here we introduce a new framework for signal alignment, namely the Globally Optimal Reparameterization Algorithm (GORA). We review the algorithm's mathematical foundation and provide a numerical verification of its theoretical basis. We compare the performance of GORA with that of the DTW and FastDTW algorithms, in terms of computational efficiency and accuracy in matching signals. Our results show a significant improvement in both speed and accuracy over the DTW and FastDTW algorithms and suggest that GORA has the potential to provide a highly effective framework for signal alignment and action recognition.