 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Emergence of Adversarial Communication in Multi-Agent Reinforcement Learning
Paper and Code
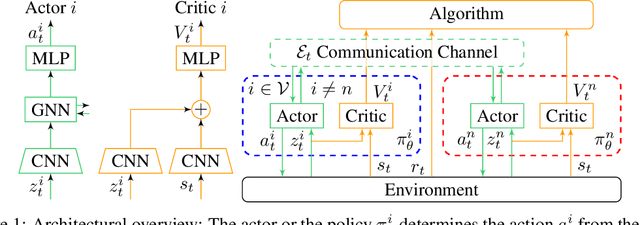

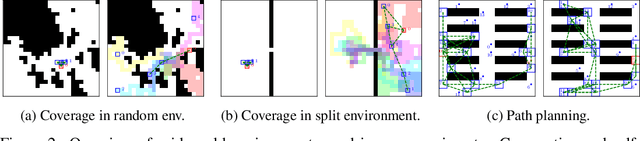

Many real-world problems require the coordination of multiple autonomous agents. Recent work has shown the promise of Graph Neural Networks (GNNs) to learn explicit communication strategies that enable complex multi-agent coordination. These works use models of cooperative multi-agent systems whereby agents strive to achieve a shared global goal. When considering agents with self-interested local objectives, the standard design choice is to model these as separate learning systems (albeit sharing the same environment). Such a design choice, however, precludes the existence of a single, differentiable communication channel, and consequently prohibits the learning of inter-agent communication strategies. In this work, we address this gap by presenting a learning model that accommodates individual non-shared rewards and a differentiable communication channel that is common among all agents. We focus on the case where agents have self-interested objectives, and develop a learning algorithm that elicits the emergence of adversarial communications. We perform experiments on multi-agent coverage and path planning problems, and employ a post-hoc interpretability technique to visualize the messages that agents communicate to each other. We show how a single self-interested agent is capable of learning highly manipulative communication strategies that allows it to significantly outperform a cooperative team of agents.