 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Elusive Present: Hidden Past and Future Dependency and Why We Build Models
Paper and Code
Jul 02, 2015


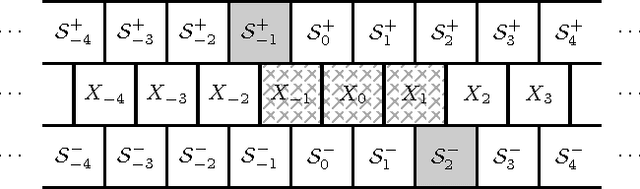
Modeling a temporal process as if it is Markovian assumes the present encodes all of the process's history. When this occurs, the present captures all of the dependency between past and future. We recently showed that if one randomly samples in the space of structured processes, this is almost never the case. So, how does the Markov failure come about? That is, how do individual measurements fail to encode the past? And, how many are needed to capture dependencies between the past and future? Here, we investigate how much information can be shared between the past and future, but not be reflected in the present. We quantify this elusive information, give explicit calculational methods, and draw out the consequences. The most important of which is that when the present hides past-future dependency we must move beyond sequence-based statistics and build state-based models.