 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Edge of Depth: Explicit Constraints between Segmentation and Depth
Paper and Code
Apr 01, 2020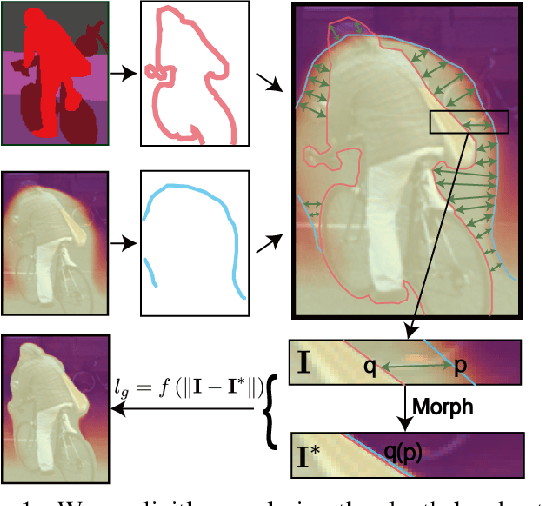
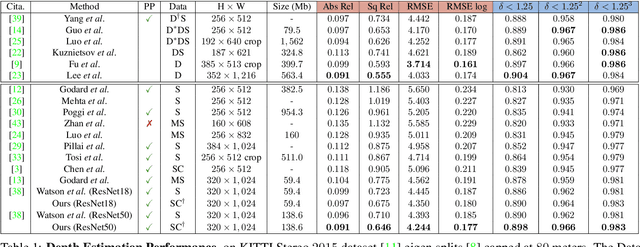
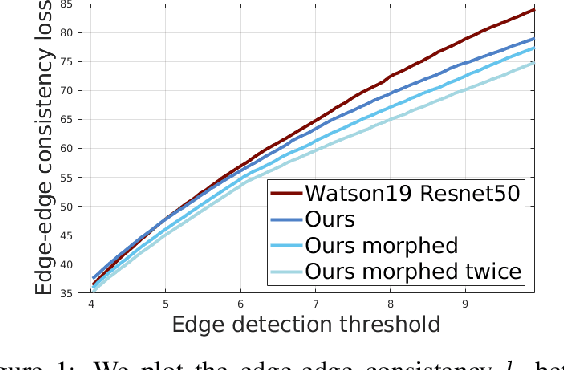
In this work we study the mutual benefits of two common computer vision tasks, self-supervised depth estimation and semantic segmentation from images. For example, to help unsupervised monocular depth estimation, constraints from semantic segmentation has been explored implicitly such as sharing and transforming features. In contrast, we propose to explicitly measure the border consistency between segmentation and depth and minimize it in a greedy manner by iteratively supervising the network towards a locally optimal solution. Partially this is motivated by our observation that semantic segmentation even trained with limited ground truth (200 images of KITTI) can offer more accurate border than that of any (monocular or stereo) image-based depth estimation. Through extensive experiments, our proposed approach advances the state of the art on unsupervised monocular depth estimation in the KITTI.