 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Dynamical Gaussian Process Latent Variable Model in the Longitudinal Scenario
Paper and Code
Sep 25, 2019

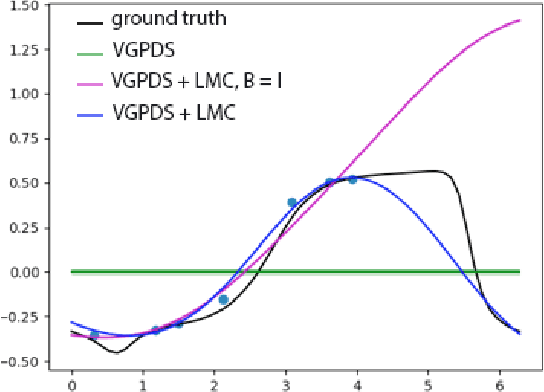
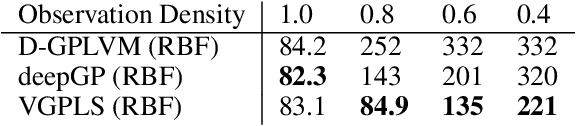
The Dynamical Gaussian Process Latent Variable Models provide an elegant non-parametric framework for learning the low dimensional representations of the high-dimensional time-series. Real world observational studies, however, are often ill-conditioned: the observations can be noisy, not assuming the luxury of relatively complete and equally spaced like those in time series. Such conditions make it difficult to learn reasonable representations in the high dimensional longitudinal data set by way of Gaussian Process Latent Variable Model as well as other dimensionality reduction procedures. In this study, we approach the inference of Gaussian Process Dynamical Systems in Longitudinal scenario by augmenting the bound in the variational approximation to include systematic samples of the unseen observations. We demonstrate the usefulness of this approach on synthetic as well as the human motion capture data set.