 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe connection between Bayesian estimation of a Gaussian random field and RKHS
Paper and Code
Jul 17, 2013
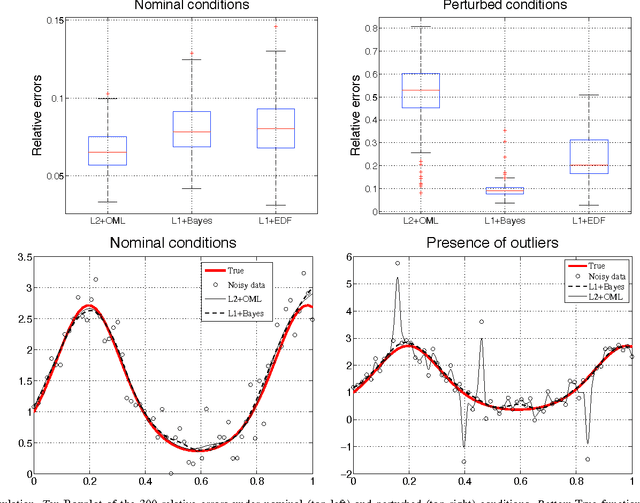
Reconstruction of a function from noisy data is often formulated as a regularized optimization problem over an infinite-dimensional reproducing kernel Hilbert space (RKHS). The solution describes the observed data and has a small RKHS norm. When the data fit is measured using a quadratic loss, this estimator has a known statistical interpretation. Given the noisy measurements, the RKHS estimate represents the posterior mean (minimum variance estimate) of a Gaussian random field with covariance proportional to the kernel associated with the RKHS. In this paper, we provide a statistical interpretation when more general losses are used, such as absolute value, Vapnik or Huber. Specifically, for any finite set of sampling locations (including where the data were collected), the MAP estimate for the signal samples is given by the RKHS estimate evaluated at these locations.