 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTesting and verification of neural-network-based safety-critical control software: A systematic literature review
Paper and Code
Oct 05, 2019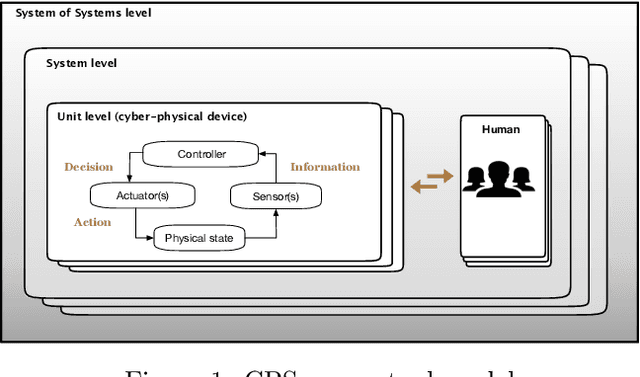
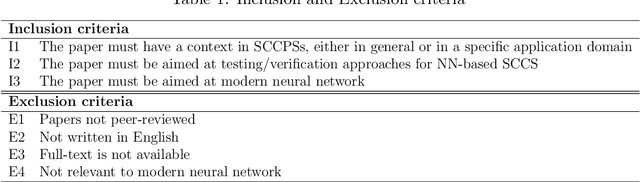
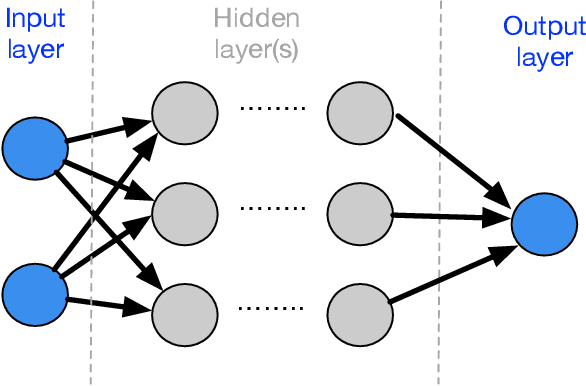
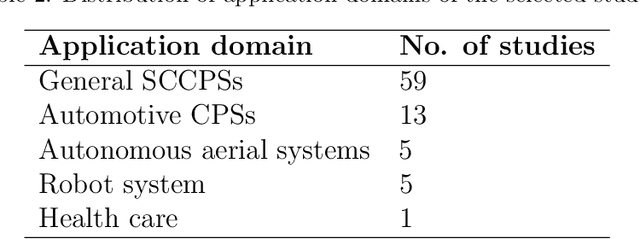
Context: Neural Network (NN) algorithms have been successfully adopted in a number of Safety-Critical Cyber-Physical Systems (SCCPSs). Testing and Verification (T&V) of NN-based control software in safety-critical domains are gaining interest and attention from both software engineering and safety engineering researchers and practitioners. Objective: With the increase in studies on the T&V of NN-based control software in safety-critical domains, it is important to systematically review the state-of-the-art T&V methodologies, to classify approaches and tools that are invented, and to identify challenges and gaps for future studies. Method: We retrieved 950 papers on the T&V of NN-based Safety-Critical Control Software (SCCS). To reach our result, we filtered 83 primary papers published between 2001 and 2018, applied the thematic analysis approach for analyzing the data extracted from the selected papers, presented the classification of approaches, and identified challenges. Conclusion: The approaches were categorized into five high-order themes: assuring robustness of NNs, assuring safety properties of NN-based control software, improving the failure resilience of NNs, measuring and ensuring test completeness, and improving the interpretability of NNs. From the industry perspective, improving the interpretability of NNs is a crucial need in safety-critical applications. We also investigated nine safety integrity properties within four major safety lifecycle phases to investigate the achievement level of T&V goals in IEC 61508-3. Results show that correctness, completeness, freedom from intrinsic faults, and fault tolerance have drawn most attention from the research community. However, little effort has been invested in achieving repeatability; no reviewed study focused on precisely defined testing configuration or on defense against common cause failure.