 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTBD Pedestrian Data Collection: Towards Rich, Portable, and Large-Scale Natural Pedestrian Data
Paper and Code
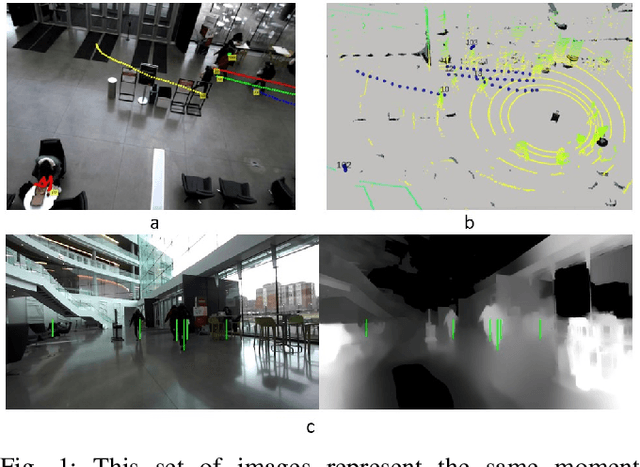

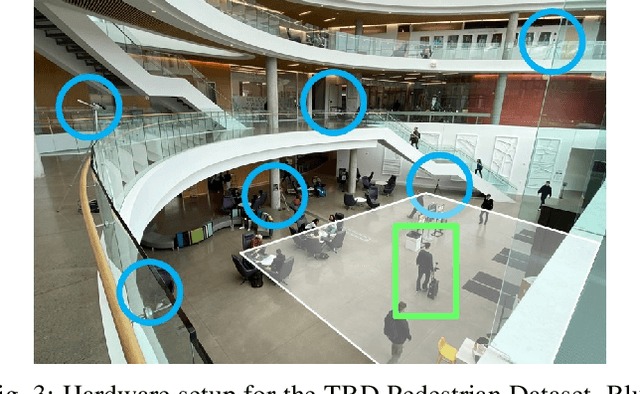
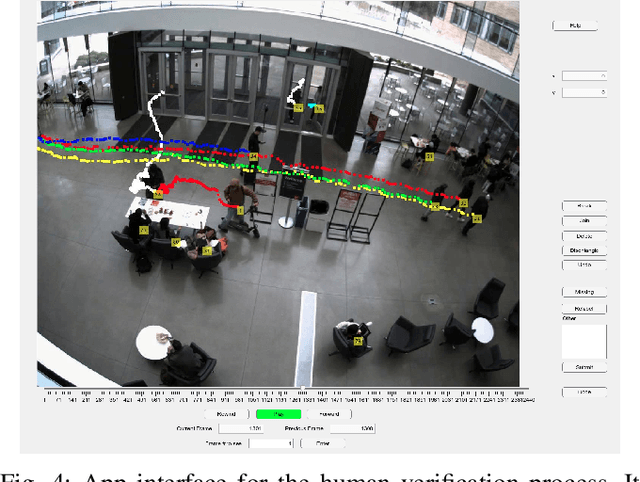
Social navigation and pedestrian behavior research has shifted towards machine learning-based methods and converged on the topic of modeling inter-pedestrian interactions and pedestrian-robot interactions. For this, large-scale datasets that contain rich information are needed. We describe a portable data collection system, coupled with a semi-autonomous labeling pipeline. As part of the pipeline, we designed a label correction web app that facilitates human verification of automated pedestrian tracking outcomes. Our system enables large-scale data collection in diverse environments and fast trajectory label production. Compared with existing pedestrian data collection methods, our system contains three components: a combination of top-down and ego-centric views, natural human behavior in the presence of a socially appropriate "robot", and human-verified labels grounded in the metric space. To the best of our knowledge, no prior data collection system has a combination of all three components. We further introduce our ever-expanding dataset from the ongoing data collection effort -- the TBD Pedestrian Dataset and show that our collected data is larger in scale, contains richer information when compared to prior datasets with human-verified labels, and supports new research opportunities.