 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTAPA-MVS: Textureless-Aware PAtchMatch Multi-View Stereo
Paper and Code
Mar 26, 2019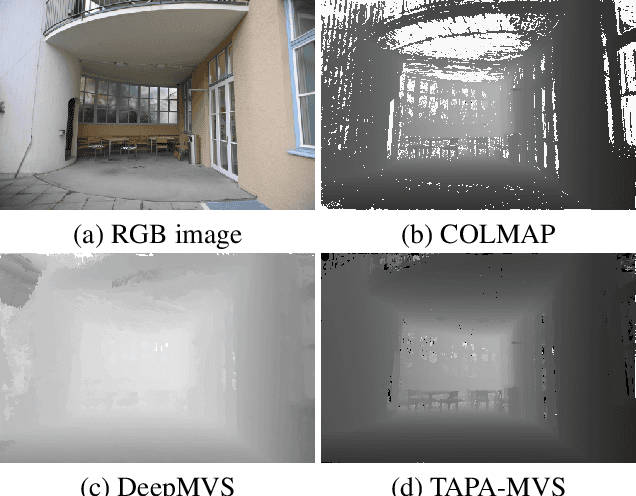
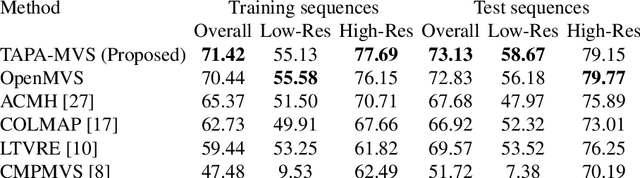
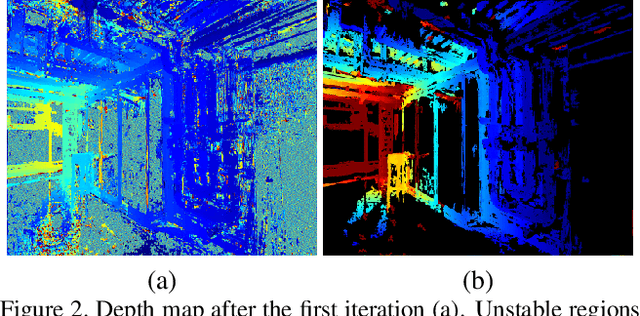
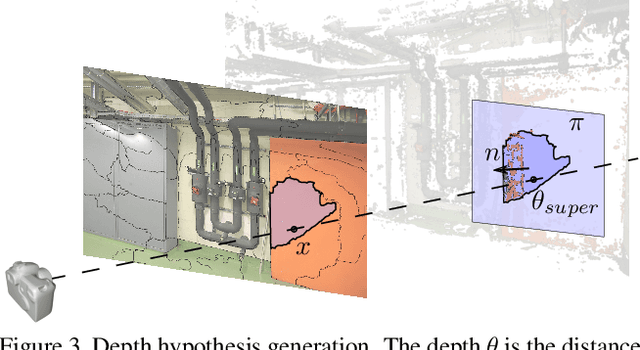
One of the most successful approaches in Multi-View Stereo estimates a depth map and a normal map for each view via PatchMatch-based optimization and fuses them into a consistent 3D points cloud. This approach relies on photo-consistency to evaluate the goodness of a depth estimate. It generally produces very accurate results; however, the reconstructed model often lacks completeness, especially in correspondence of broad untextured areas where the photo-consistency metrics are unreliable. Assuming the untextured areas piecewise planar, in this paper we generate novel PatchMatch hypotheses so to expand reliable depth estimates in neighboring untextured regions. At the same time, we modify the photo-consistency measure such to favor standard or novel PatchMatch depth hypotheses depending on the textureness of the considered area. We also propose a depth refinement step to filter wrong estimates and to fill the gaps on both the depth maps and normal maps while preserving the discontinuities. The effectiveness of our new methods has been tested against several state of the art algorithms in the publicly available ETH3D dataset containing a wide variety of high and low-resolution images.