 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTangent Space Backpropagation for 3D Transformation Groups
Paper and Code
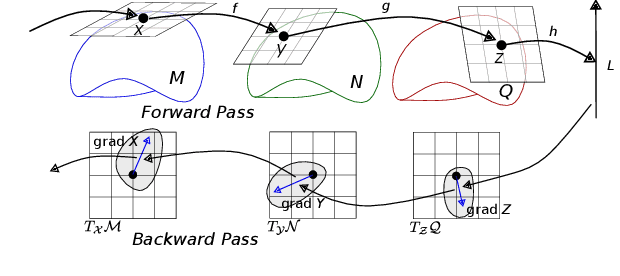
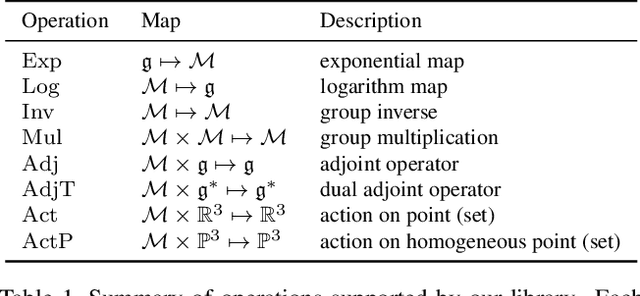
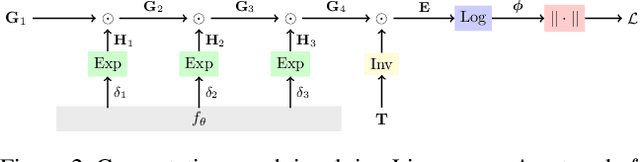
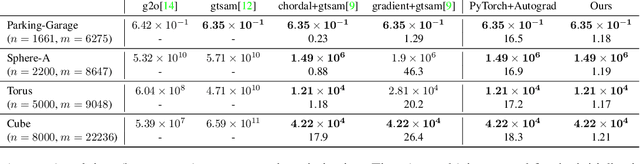
We address the problem of performing backpropagation for computation graphs involving 3D transformation groups SO(3), SE(3), and Sim(3). 3D transformation groups are widely used in 3D vision and robotics, but they do not form vector spaces and instead lie on smooth manifolds. The standard backpropagation approach, which embeds 3D transformations in Euclidean spaces, suffers from numerical difficulties. We introduce a new library, which exploits the group structure of 3D transformations and performs backpropagation in the tangent spaces of manifolds. We show that our approach is numerically more stable, easier to implement, and beneficial to a diverse set of tasks. Our plug-and-play PyTorch library is available at https://github.com/princeton-vl/lietorch.