 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSystematic Generalization and Emergent Structures in Transformers Trained on Structured Tasks
Paper and Code
Oct 02, 2022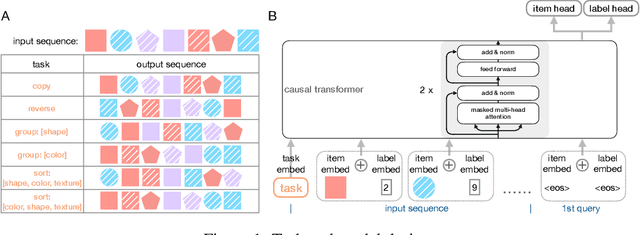
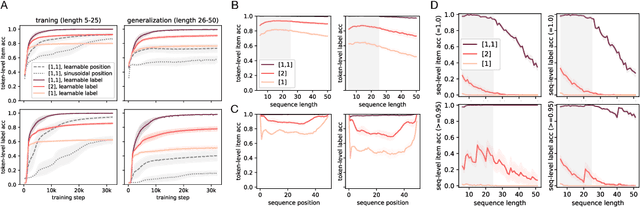
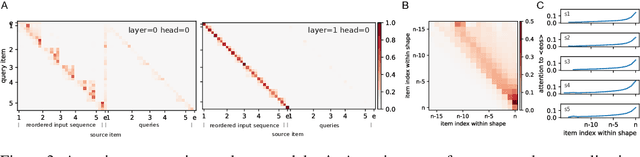
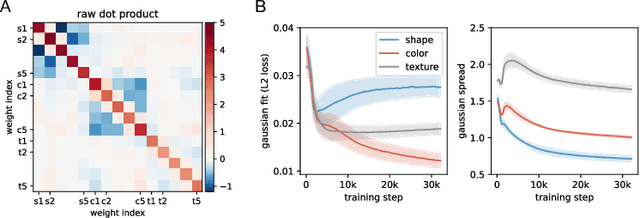
Transformer networks have seen great success in natural language processing and machine vision, where task objectives such as next word prediction and image classification benefit from nuanced context sensitivity across high-dimensional inputs. However, there is an ongoing debate about how and when transformers can acquire highly structured behavior and achieve systematic generalization. Here, we explore how well a causal transformer can perform a set of algorithmic tasks, including copying, sorting, and hierarchical compositions of these operations. We demonstrate strong generalization to sequences longer than those used in training by replacing the standard positional encoding typically used in transformers with labels arbitrarily paired with items in the sequence. By finding the layer and head configuration sufficient to solve the task, then performing ablation experiments and representation analysis, we show that two-layer transformers learn generalizable solutions to multi-level problems and develop signs of systematic task decomposition. They also exploit shared computation across related tasks. These results provide key insights into how transformer models may be capable of decomposing complex decisions into reusable, multi-level policies in tasks requiring structured behavior.