 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSynthesis of Distributed Control and Communication Schemes from Global LTL Specifications
Paper and Code
Sep 06, 2011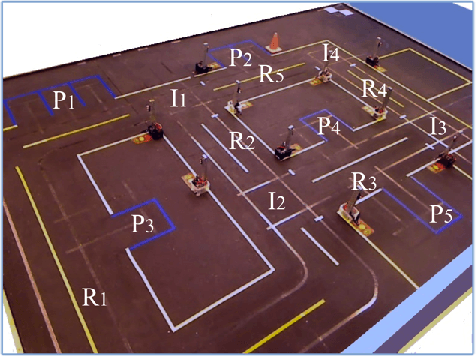
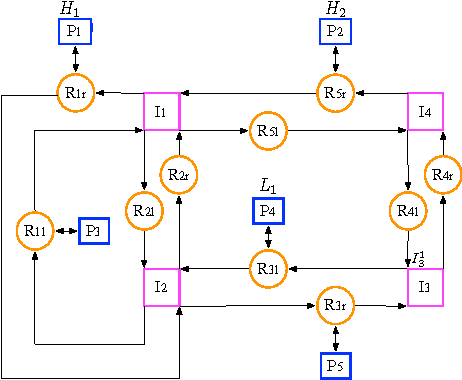
We introduce a technique for synthesis of control and communication strategies for a team of agents from a global task specification given as a Linear Temporal Logic (LTL) formula over a set of properties that can be satisfied by the agents. We consider a purely discrete scenario, in which the dynamics of each agent is modeled as a finite transition system. The proposed computational framework consists of two main steps. First, we extend results from concurrency theory to check whether the specification is distributable among the agents. Second, we generate individual control and communication strategies by using ideas from LTL model checking. We apply the method to automatically deploy a team of miniature cars in our Robotic Urban-Like Environment.