 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSympOCnet: Solving optimal control problems with applications to high-dimensional multi-agent path planning problems
Paper and Code
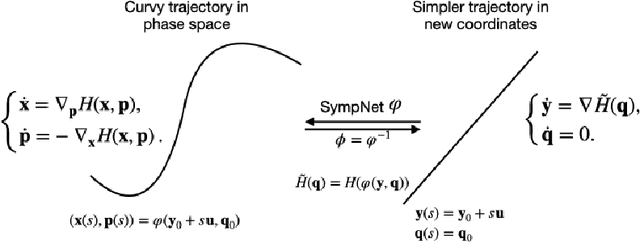

Solving high-dimensional optimal control problems in real-time is an important but challenging problem, with applications to multi-agent path planning problems, which have drawn increased attention given the growing popularity of drones in recent years. In this paper, we propose a novel neural network method called SympOCnet that applies the Symplectic network to solve high-dimensional optimal control problems with state constraints. We present several numerical results on path planning problems in two-dimensional and three-dimensional spaces. Specifically, we demonstrate that our SympOCnet can solve a problem with more than 500 dimensions in 1.5 hours on a single GPU, which shows the effectiveness and efficiency of SympOCnet. The proposed method is scalable and has the potential to solve truly high-dimensional path planning problems in real-time.