 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSymAR: Symmetry Abstractions and Refinement for Accelerating Scenarios with Neural Network Controllers Verification
Paper and Code
Nov 21, 2020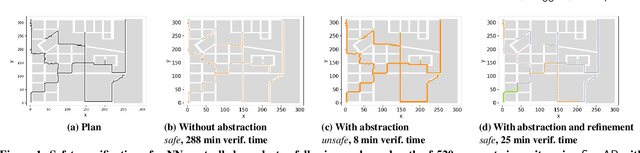
We present a Symmetry-based abstraction refinement algorithm SymAR that is directed towards safety verification of large-scale scenarios with complex dynamical systems. The abstraction maps modes with symmetric dynamics to a single abstract mode and refinements recursively split the modes when safety checks fail. We show how symmetry abstractions can be applied effectively to closed-loop control systems, including non-symmetric deep neural network (DNN) controllers. For such controllers, we transform their inputs and outputs to enforce symmetry and make the closed loop system amenable for abstraction. We implemented SymAR in Python and used it to verify paths with 100s of segments in 2D and 3D scenarios followed by a six dimensional DNN-controlled quadrotor, and also a ground vehicle. Our experiments show significant savings, up to 10x in some cases, in verification time over existing methods.