 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSwitching Pushing Skill Combined MPC and Deep Reinforcement Learning for Planar Non-prehensile Manipulation
Paper and Code
Mar 30, 2023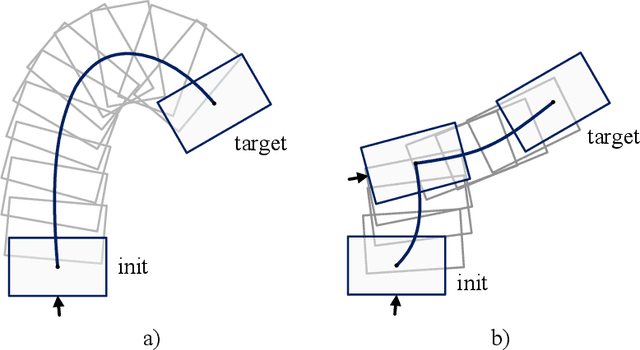
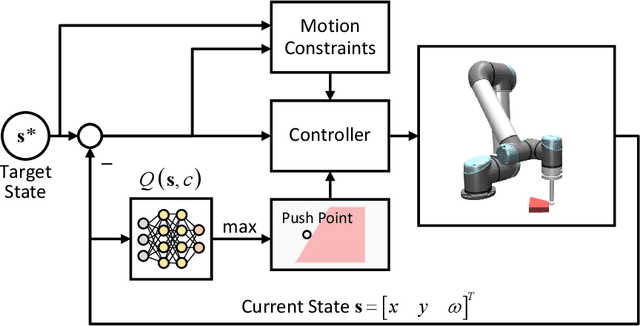

In this paper, a novel switching pushing skill algorithm is proposed to improve the efficiency of planar non-prehensile manipulation, which draws inspiration from human pushing actions and comprises two sub-problems, i.e., discrete decision-making of pushing point and continuous feedback control of pushing action. In order to solve the sub-problems above, a combination of Model Predictive Control (MPC) and Deep Reinforcement Learning (DRL) method is employed. Firstly, the selection of pushing point is modeled as a Markov decision process,and an off-policy DRL method is used by reshaping the reward function to train the decision-making model for selecting pushing point from a pre-constructed set based on the current state. Secondly, a motion constraint region (MCR) is constructed for the specific pushing point based on the distance from the target, followed by utilizing the MPC controller to regulate the motion of the object within the MCR towards the target pose. The trigger condition for switching the pushing point occurs when the object reaches the boundary of the MCR under the pushing action. Subsequently, the pushing point and the controller are updated iteratively until the target pose is reached. We conducted pushing experiments on four distinct object shapes in both simulated and physical environments to evaluate our method. The results indicate that our method achieves a significantly higher training efficiency, with a training time that is only about 20% of the baseline method while maintaining around the same success rate. Moreover, our method outperforms the baseline method in terms of both training and execution efficiency of pushing operations, allowing for rapid learning of robot pushing skills.