 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSupervised Advantage Actor-Critic for Recommender Systems
Paper and Code
Nov 05, 2021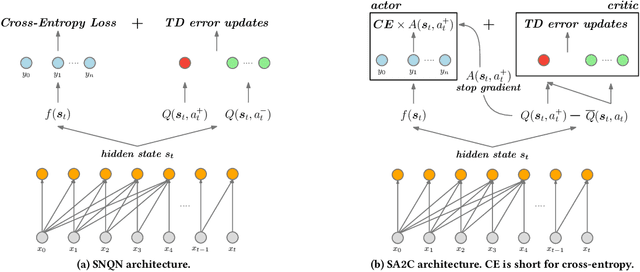

Casting session-based or sequential recommendation as reinforcement learning (RL) through reward signals is a promising research direction towards recommender systems (RS) that maximize cumulative profits. However, the direct use of RL algorithms in the RS setting is impractical due to challenges like off-policy training, huge action spaces and lack of sufficient reward signals. Recent RL approaches for RS attempt to tackle these challenges by combining RL and (self-)supervised sequential learning, but still suffer from certain limitations. For example, the estimation of Q-values tends to be biased toward positive values due to the lack of negative reward signals. Moreover, the Q-values also depend heavily on the specific timestamp of a sequence. To address the above problems, we propose negative sampling strategy for training the RL component and combine it with supervised sequential learning. We call this method Supervised Negative Q-learning (SNQN). Based on sampled (negative) actions (items), we can calculate the "advantage" of a positive action over the average case, which can be further utilized as a normalized weight for learning the supervised sequential part. This leads to another learning framework: Supervised Advantage Actor-Critic (SA2C). We instantiate SNQN and SA2C with four state-of-the-art sequential recommendation models and conduct experiments on two real-world datasets. Experimental results show that the proposed approaches achieve significantly better performance than state-of-the-art supervised methods and existing self-supervised RL methods . Code will be open-sourced.