 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStructure PLP-SLAM: Efficient Sparse Mapping and Localization using Point, Line and Plane for Monocular, RGB-D and Stereo Cameras
Paper and Code
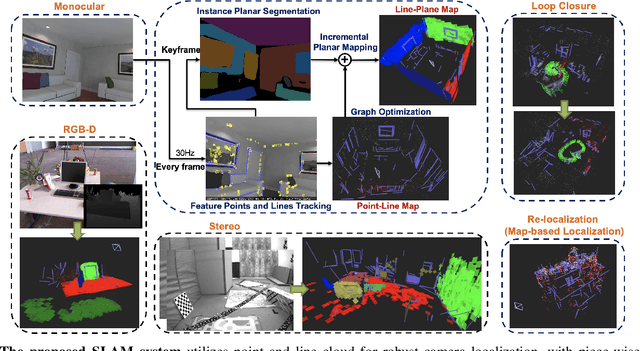
This paper demonstrates a visual SLAM system that utilizes point and line cloud for robust camera localization, simultaneously, with an embedded piece-wise planar reconstruction (PPR) module which in all provides a structural map. To build a scale consistent map in parallel with tracking, such as employing a single camera brings the challenge of reconstructing geometric primitives with scale ambiguity, and further introduces the difficulty in graph optimization of bundle adjustment (BA). We address these problems by proposing several run-time optimizations on the reconstructed lines and planes. The system is then extended with depth and stereo sensors based on the design of the monocular framework. The results show that our proposed SLAM tightly incorporates the semantic features to boost both frontend tracking as well as backend optimization. We evaluate our system exhaustively on various datasets, and open-source our code for the community (https://github.com/PeterFWS/Structure-PLP-SLAM).