Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStrategy to Increase the Safety of a DNN-based Perception for HAD Systems
Paper and Code
Feb 20, 2020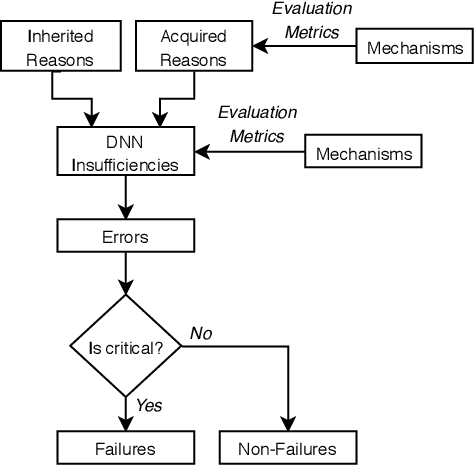
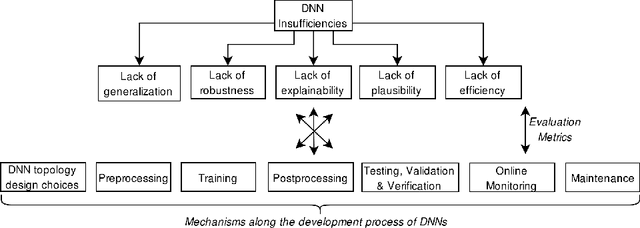
Safety is one of the most important development goals for highly automated driving (HAD) systems. This applies in particular to the perception function driven by Deep Neural Networks (DNNs). For these, large parts of the traditional safety processes and requirements are not fully applicable or sufficient. The aim of this paper is to present a framework for the description and mitigation of DNN insufficiencies and the derivation of relevant safety mechanisms to increase the safety of DNNs. To assess the effectiveness of these safety mechanisms, we present a categorization scheme for evaluation metrics.
View paper on