 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStrategies for modelling open-loop saccade control of a cable-driven biomimetic robot eye
Paper and Code
Mar 01, 2022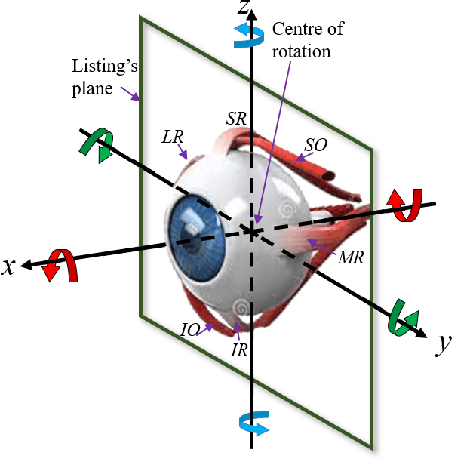
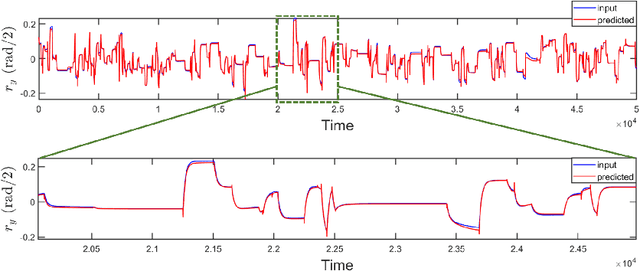

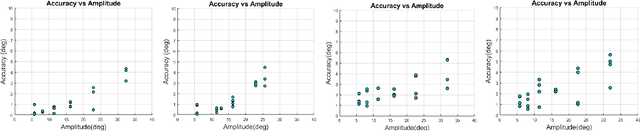
In human-robot interactions, eye movements play an important role in non-verbal communication. However, controlling the motions of a robotic eye that display similar performance as the human oculomotor system is still a major challenge. In this paper, we study how to control a realistic model of the human eye, with a cable-driven actuation system that mimicks the 6 extra-ocular muscles. We have built a robotic prototype and developed a non-linear simulation model, for which we compared different techniques to control its gaze behavior to match the main characteristics of saccade eye movements. In the first approach, we linearized the six degrees of freedom nonlinear model, using a local derivative technique, and designed linear-quadratic optimal controllers to optimize a cost function that accounts for accuracy, energy and duration. The second method learns a dynamic neural-network that matches the system dynamics, trained from sample trajectories of the system, and a non-linear trajectory optimization solver optimized a similar cost function. We focused on the generation of rapid saccadic eye movements with fully unconstrained kinematics, and the generation of control signals for the six cables that simultaneously satisfied several dynamic optimization criteria. The model faithfully mimicked the three-dimensional rotational kinematics and dynamics observed for human saccades. Our experimental results indicate that while the linear model provides a more accurate eye movement, the nonlinear model simulate eye dynamic properties in a better way faithful approximation to the properties of the human saccadic system than the linearized model, at the cost of larger training and optimization time.