 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStochastic Spatio-Temporal Optimization for Control and Co-Design of Systems in Robotics and Applied Physics
Paper and Code
Feb 18, 2021
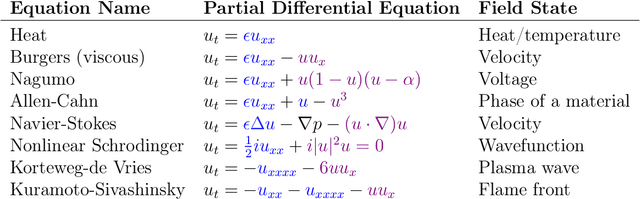
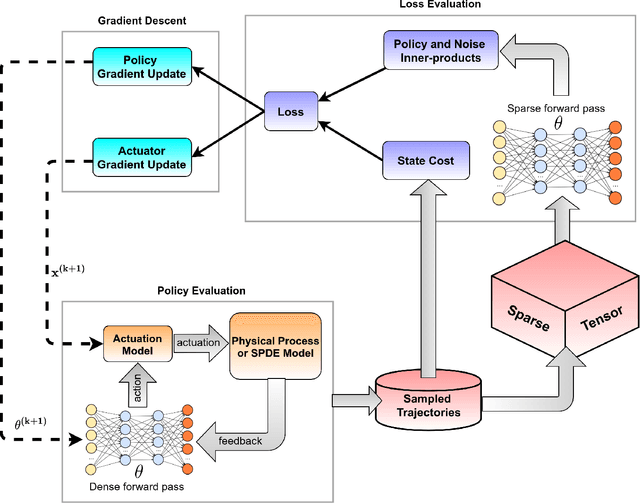
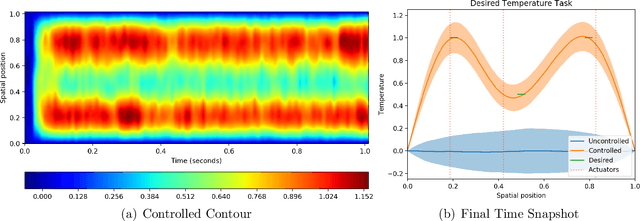
Correlated with the trend of increasing degrees of freedom in robotic systems is a similar trend of rising interest in Spatio-Temporal systems described by Partial Differential Equations (PDEs) among the robotics and control communities. These systems often exhibit dramatic under-actuation, high dimensionality, bifurcations, and multimodal instabilities. Their control represents many of the current-day challenges facing the robotics and automation communities. Not only are these systems challenging to control, but the design of their actuation is an NP-hard problem on its own. Recent methods either discretize the space before optimization, or apply tools from linear systems theory under restrictive linearity assumptions in order to arrive at a control solution. This manuscript provides a novel sampling-based stochastic optimization framework based entirely in Hilbert spaces suitable for the general class of \textit{semi-linear} SPDEs which describes many systems in robotics and applied physics. This framework is utilized for simultaneous policy optimization and actuator co-design optimization. The resulting algorithm is based on variational optimization, and performs joint episodic optimization of the feedback control law and the actuation design over episodes. We study first and second order systems, and in doing so, extend several results to the case of second order SPDEs. Finally, we demonstrate the efficacy of the proposed approach with several simulated experiments on a variety of SPDEs in robotics and applied physics including an infinite degree-of-freedom soft robotic manipulator.