 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStochastic Occupancy Grid Map Prediction in Dynamic Scenes
Paper and Code


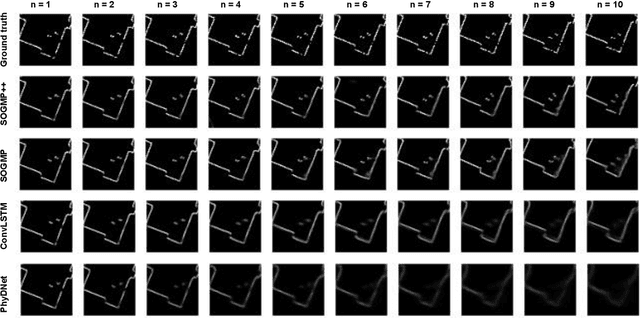
This paper presents two variations of a novel stochastic prediction algorithm that enables mobile robots to accurately and robustly predict the future state of complex dynamic scenes, such as environments full of people. The proposed algorithm uses a variational autoencoder-based neural network to predict a range of possible future states of the environment. The algorithm takes full advantage of the motion of the robot itself, the motion of dynamic objects, and the geometry of static objects in the scene to improve prediction accuracy. Three different datasets collected by different robot models are used to demonstrate that the proposed algorithm is able to achieve smaller absolute error, higher structure similarity, and higher tracking accuracy than state-of-the-art prediction algorithms for video prediction tasks. Implementations of both proposed stochastic prediction algorithms are available open source at https://github.com/TempleRAIL/SOGMP.