Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStochastic Event-triggered Variational Bayesian Filtering
Paper and Code
Jun 14, 2022
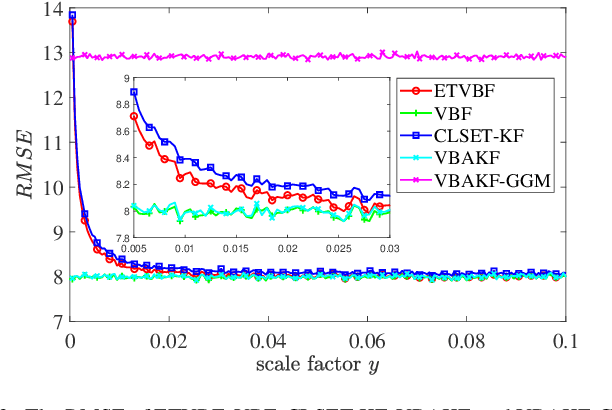
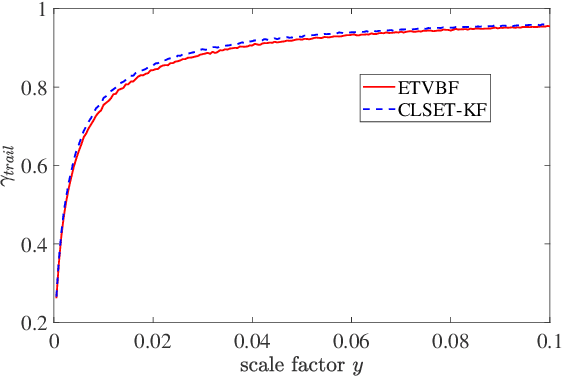
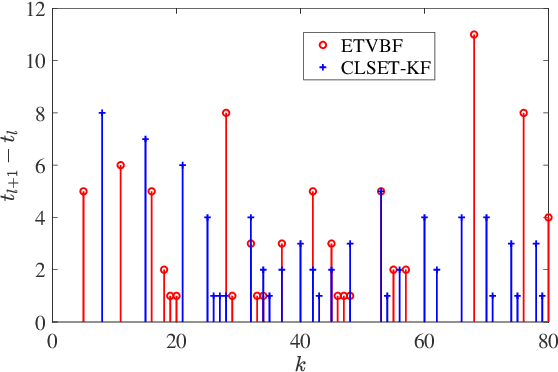
This paper proposes an event-triggered variational Bayesian filter for remote state estimation with unknown and time-varying noise covariances. After presetting multiple nominal process noise covariances and an initial measurement noise covariance, a variational Bayesian method and a fixed-point iteration method are utilized to jointly estimate the posterior state vector and the unknown noise covariances under a stochastic event-triggered mechanism. The proposed algorithm ensures low communication loads and excellent estimation performances for a wide range of unknown noise covariances. Finally, the performance of the proposed algorithm is demonstrated by tracking simulations of a vehicle.
View paper on