 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStein Variational Goal Generation For Reinforcement Learning in Hard Exploration Problems
Paper and Code
Jun 14, 2022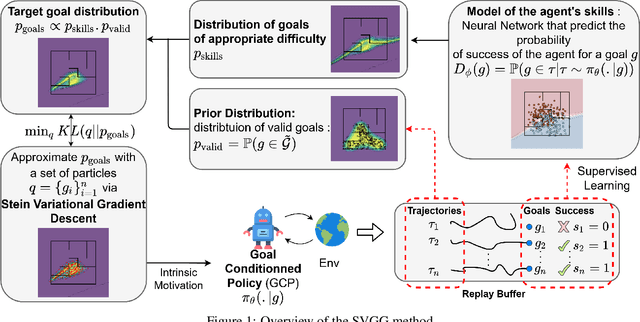



Multi-goal Reinforcement Learning has recently attracted a large amount of research interest. By allowing experience to be shared between related training tasks, this setting favors generalization for new tasks at test time, whenever some smoothness exists in the considered representation space of goals. However, in settings with discontinuities in state or goal spaces (e.g. walls in a maze), a majority of goals are difficult to reach, due to the sparsity of rewards in the absence of expert knowledge. This implies hard exploration, for which some curriculum of goals must be discovered, to help agents learn by adapting training tasks to their current capabilities. Building on recent automatic curriculum learning techniques for goal-conditioned policies, we propose a novel approach: Stein Variational Goal Generation (SVGG), which seeks at preferably sampling new goals in the zone of proximal development of the agent, by leveraging a learned model of its abilities, and a goal distribution modeled as particles in the exploration space. Our approach relies on Stein Variational Gradient Descent to dynamically attract the goal sampling distribution in areas of appropriate difficulty. We demonstrate the performances of the approach, in terms of success coverage in the goal space, compared to recent state-of-the-art RL methods for hard exploration problems.