 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSTEERAGE: Synthesis of Neural Networks Using Architecture Search and Grow-and-Prune Methods
Paper and Code
Dec 12, 2019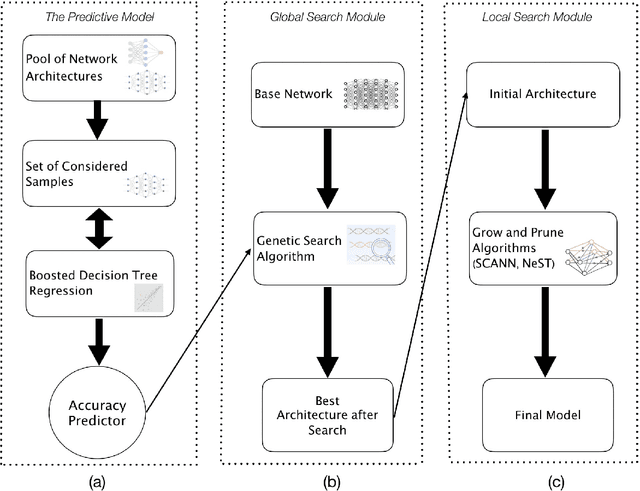
Neural networks (NNs) have been successfully deployed in many applications. However, architectural design of these models is still a challenging problem. Moreover, neural networks are known to have a lot of redundancy. This increases the computational cost of inference and poses an obstacle to deployment on Internet-of-Thing sensors and edge devices. To address these challenges, we propose the STEERAGE synthesis methodology. It consists of two complementary approaches: efficient architecture search, and grow-and-prune NN synthesis. The first step, covered in a global search module, uses an accuracy predictor to efficiently navigate the architectural search space. The predictor is built using boosted decision tree regression, iterative sampling, and efficient evolutionary search. The second step involves local search. By using various grow-and-prune methodologies for synthesizing convolutional and feed-forward NNs, it reduces the network redundancy, while boosting its performance. We have evaluated STEERAGE performance on various datasets, including MNIST and CIFAR-10. On MNIST dataset, our CNN architecture achieves an error rate of 0.66%, with 8.6x fewer parameters compared to the LeNet-5 baseline. For the CIFAR-10 dataset, we used the ResNet architectures as the baseline. Our STEERAGE-synthesized ResNet-18 has a 2.52% accuracy improvement over the original ResNet-18, 1.74% over ResNet-101, and 0.16% over ResNet-1001, while having comparable number of parameters and FLOPs to the original ResNet-18. This shows that instead of just increasing the number of layers to increase accuracy, an alternative is to use a better NN architecture with fewer layers. In addition, STEERAGE achieves an error rate of just 3.86% with a variant of ResNet architecture with 40 layers. To the best of our knowledge, this is the highest accuracy obtained by ResNet-based architectures on the CIFAR-10 dataset.