 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeState Representation Learning for Goal-Conditioned Reinforcement Learning
Paper and Code
May 04, 2022
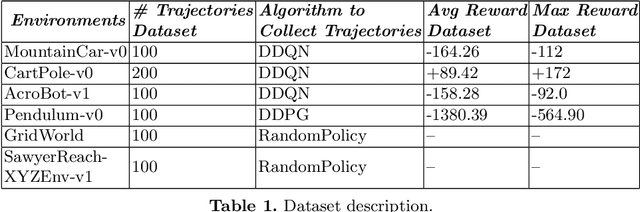
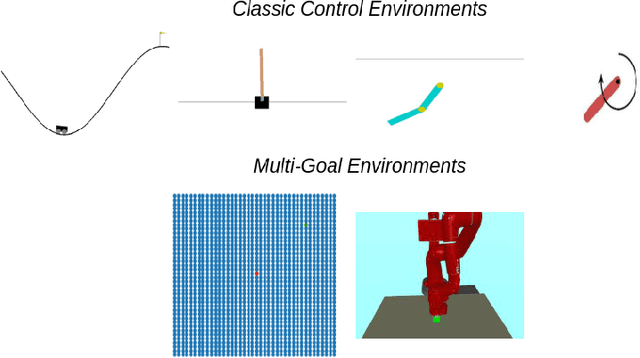
This paper presents a novel state representation for reward-free Markov decision processes. The idea is to learn, in a self-supervised manner, an embedding space where distances between pairs of embedded states correspond to the minimum number of actions needed to transition between them. Compared to previous methods, our approach does not require any domain knowledge, learning from offline and unlabeled data. We show how this representation can be leveraged to learn goal-conditioned policies, providing a notion of similarity between states and goals and a useful heuristic distance to guide planning and reinforcement learning algorithms. Finally, we empirically validate our method in classic control domains and multi-goal environments, demonstrating that our method can successfully learn representations in large and/or continuous domains.