Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStabilizing Neural Control Using Self-Learned Almost Lyapunov Critics
Paper and Code
Jul 11, 2021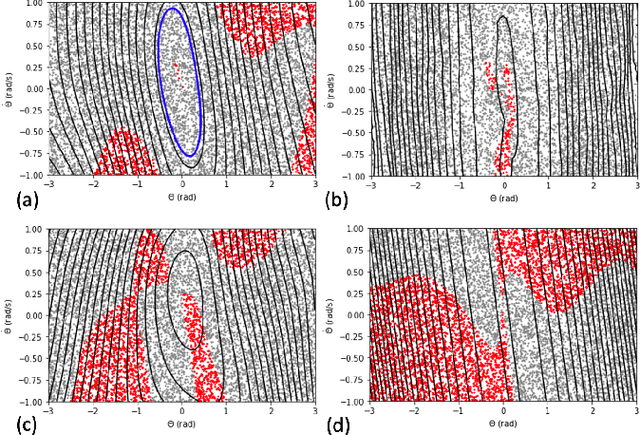
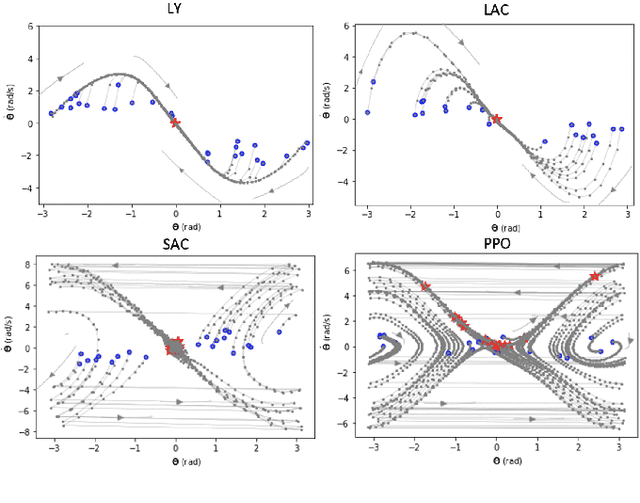
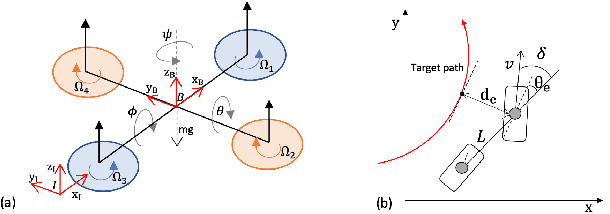
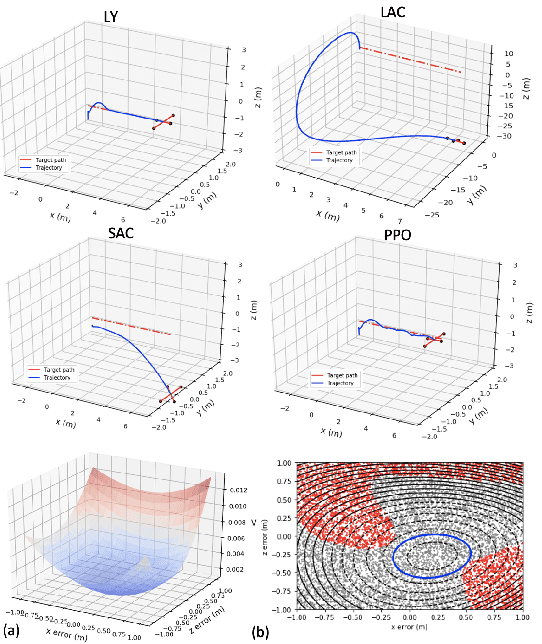
The lack of stability guarantee restricts the practical use of learning-based methods in core control problems in robotics. We develop new methods for learning neural control policies and neural Lyapunov critic functions in the model-free reinforcement learning (RL) setting. We use sample-based approaches and the Almost Lyapunov function conditions to estimate the region of attraction and invariance properties through the learned Lyapunov critic functions. The methods enhance stability of neural controllers for various nonlinear systems including automobile and quadrotor control.
* ICRA 2021
View paper on