Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStability Analysis and Learning Bounds for Transductive Regression Algorithms
Paper and Code
Apr 05, 2009
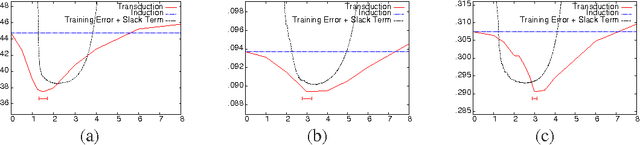
This paper uses the notion of algorithmic stability to derive novel generalization bounds for several families of transductive regression algorithms, both by using convexity and closed-form solutions. Our analysis helps compare the stability of these algorithms. It also shows that a number of widely used transductive regression algorithms are in fact unstable. Finally, it reports the results of experiments with local transductive regression demonstrating the benefit of our stability bounds for model selection, for one of the algorithms, in particular for determining the radius of the local neighborhood used by the algorithm.
* 26 pages
View paper on