Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSPRITE: Stewart Platform Robot for Interactive Tabletop Engagement
Paper and Code
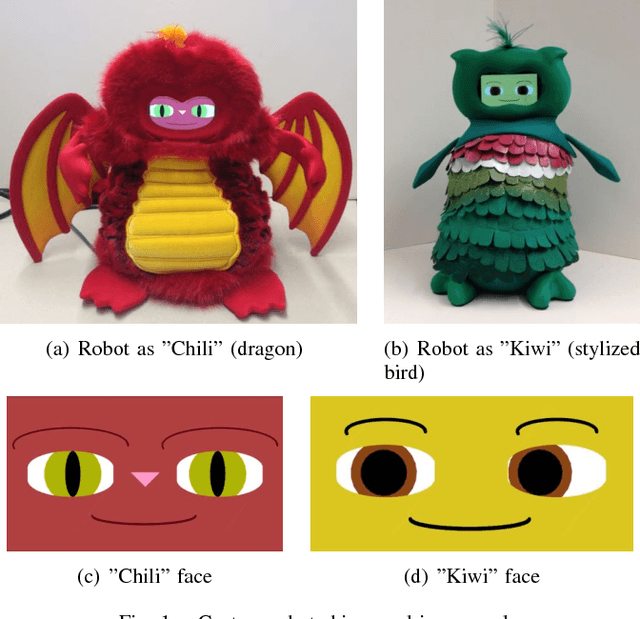
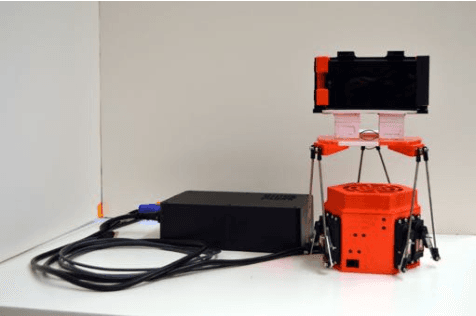
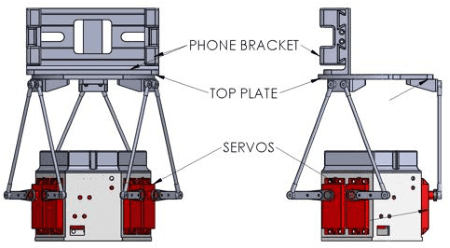
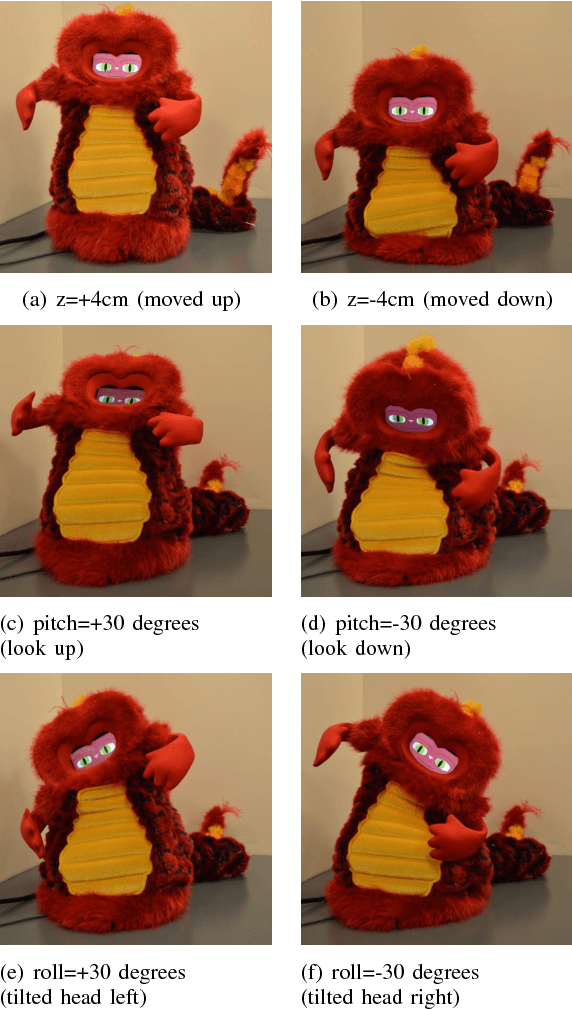
We present the design of the Stewart Platform Robot for Interactive Tabletop Engagement (SPRITE). This robot is designed for use in socially assistive robotics, a field focusing on non-contact social interaction to help people achieve goals relating to health, wellness, and education. We describe a series of design goals for a tabletop, socially assistive robot, including expressive movement, affective communication, a friendly, nonthreatening, and customizable appearance, and a safe, robust, and easily-repaired mechanical design.
* USC Department of Computer Science Technical Report
View paper on