 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSplit Learning Meets Koopman Theory for Wireless Remote Monitoring and Prediction
Paper and Code
Apr 16, 2021
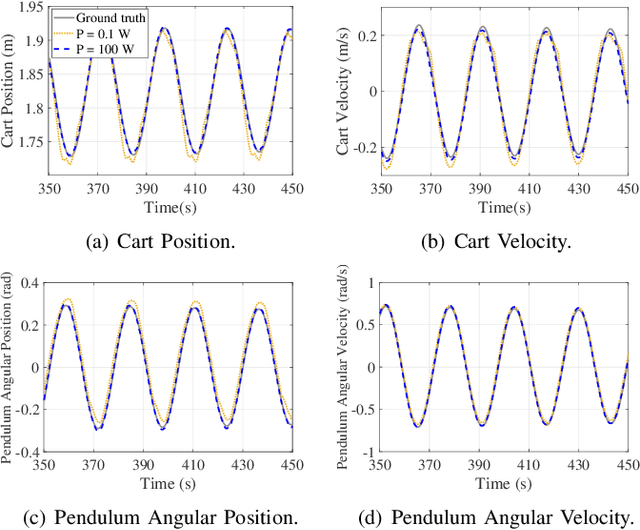
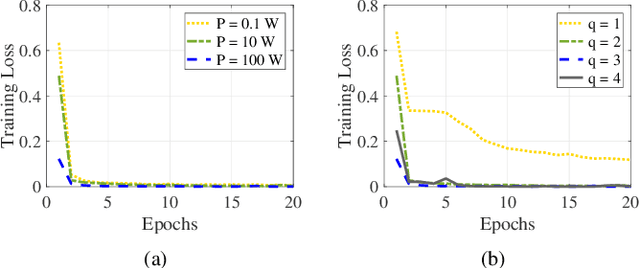
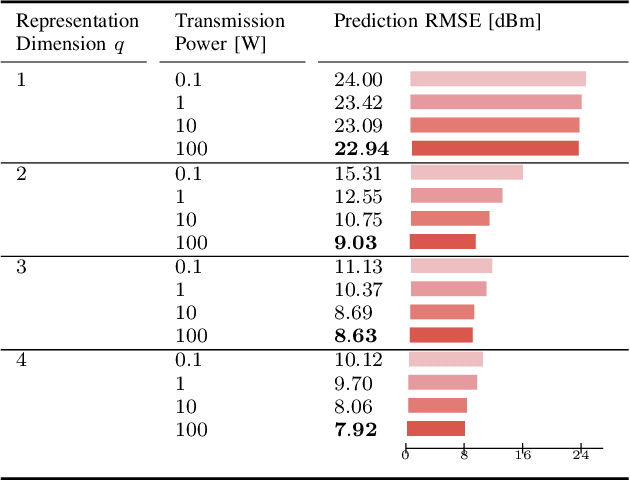
Remote state monitoring over wireless is envisaged to play a pivotal role in enabling beyond 5G applications ranging from remote drone control to remote surgery. One key challenge is to identify the system dynamics that is non-linear with a large dimensional state. To obviate this issue, in this article we propose to train an autoencoder whose encoder and decoder are split and stored at a state sensor and its remote observer, respectively. This autoencoder not only decreases the remote monitoring payload size by reducing the state representation dimension, but also learns the system dynamics by lifting it via a Koopman operator, thereby allowing the observer to locally predict future states after training convergence. Numerical results under a non-linear cart-pole environment demonstrate that the proposed split learning of a Koopman autoencoder can locally predict future states, and the prediction accuracy increases with the representation dimension and transmission power.