 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpiking Neural Networks for Early Prediction in Human Robot Collaboration
Paper and Code
Jul 29, 2018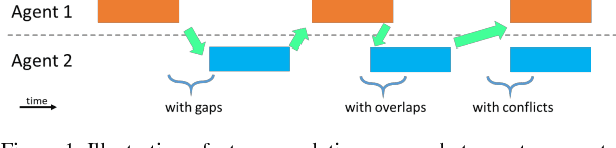

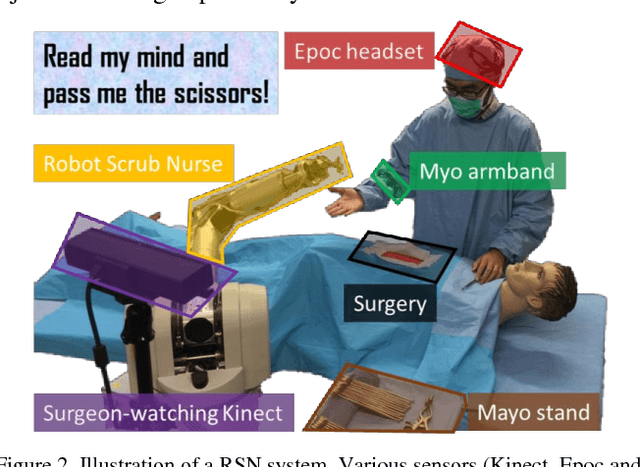

This paper introduces the Turn-Taking Spiking Neural Network (TTSNet), which is a cognitive model to perform early turn-taking prediction about human or agent's intentions. The TTSNet framework relies on implicit and explicit multimodal communication cues (physical, neurological and physiological) to be able to predict when the turn-taking event will occur in a robust and unambiguous fashion. To test the theories proposed, the TTSNet framework was implemented on an assistant robotic nurse, which predicts surgeon's turn-taking intentions and delivers surgical instruments accordingly. Experiments were conducted to evaluate TTSNet's performance in early turn-taking prediction. It was found to reach a F1 score of 0.683 given 10% of completed action, and a F1 score of 0.852 at 50% and 0.894 at 100% of the completed action. This performance outperformed multiple state-of-the-art algorithms, and surpassed human performance when limited partial observation is given (< 40%). Such early turn-taking prediction capability would allow robots to perform collaborative actions proactively, in order to facilitate collaboration and increase team efficiency.