Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpiking Neural Network based Region Proposal Networks for Neuromorphic Vision Sensors
Paper and Code
Feb 26, 2019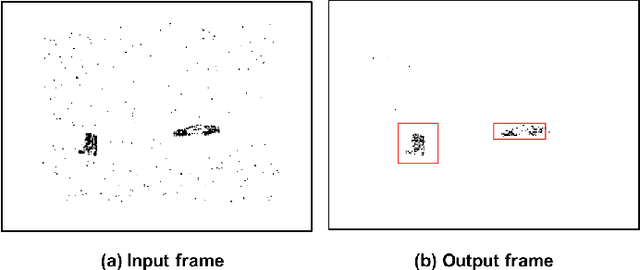
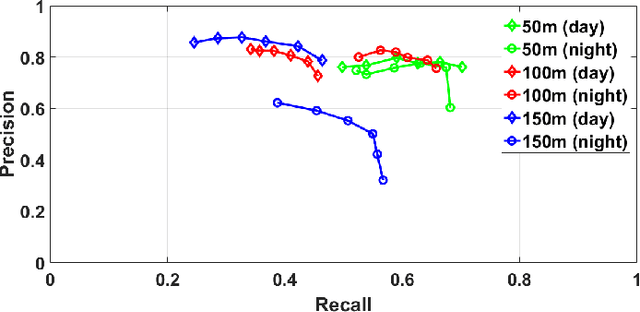
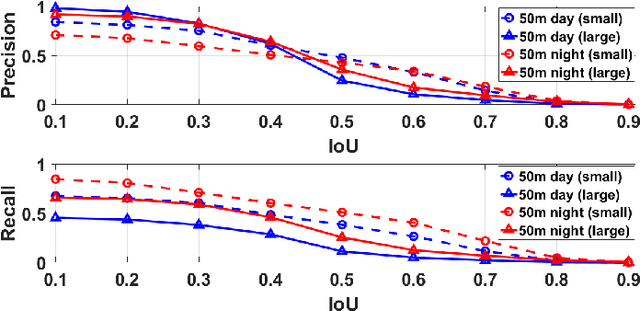
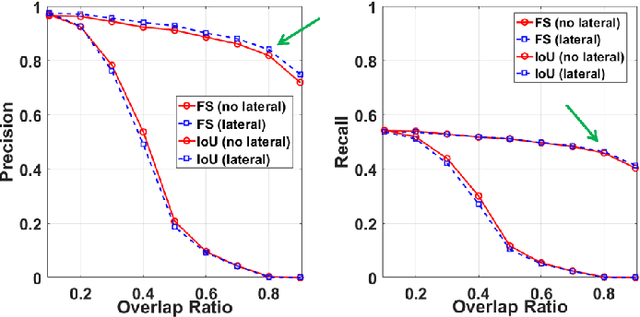
This paper presents a three layer spiking neural network based region proposal network operating on data generated by neuromorphic vision sensors. The proposed architecture consists of refractory, convolution and clustering layers designed with bio-realistic leaky integrate and fire (LIF) neurons and synapses. The proposed algorithm is tested on traffic scene recordings from a DAVIS sensor setup. The performance of the region proposal network has been compared with event based mean shift algorithm and is found to be far superior (~50% better) in recall for similar precision (~85%). Computational and memory complexity of the proposed method are also shown to be similar to that of event based mean shift
* Accepted in IEEE ISCAS, 2019
View paper on