 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSPiKE: 3D Human Pose from Point Cloud Sequences
Paper and Code
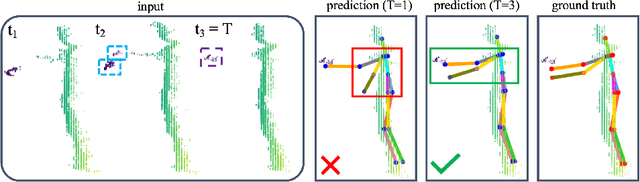
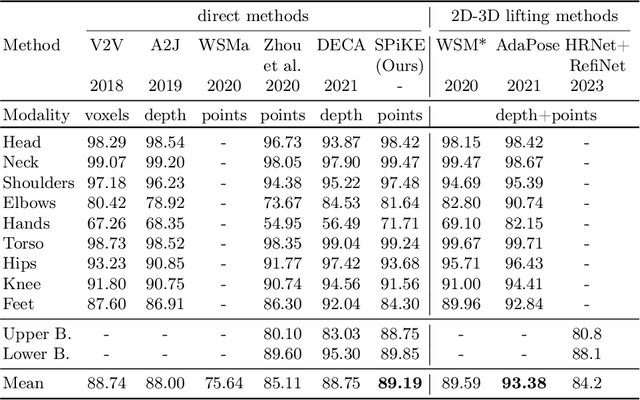
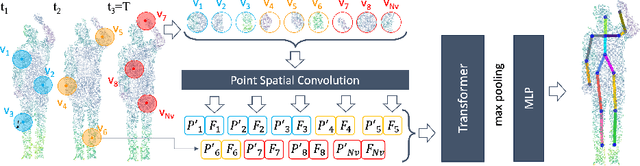
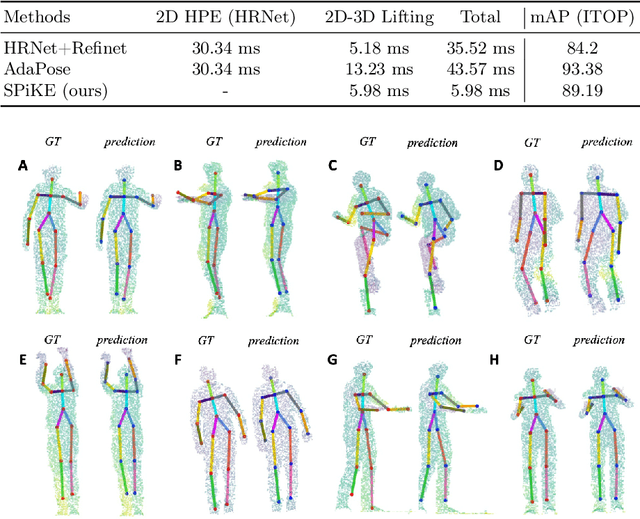
3D Human Pose Estimation (HPE) is the task of locating keypoints of the human body in 3D space from 2D or 3D representations such as RGB images, depth maps or point clouds. Current HPE methods from depth and point clouds predominantly rely on single-frame estimation and do not exploit temporal information from sequences. This paper presents SPiKE, a novel approach to 3D HPE using point cloud sequences. Unlike existing methods that process frames of a sequence independently, SPiKE leverages temporal context by adopting a Transformer architecture to encode spatio-temporal relationships between points across the sequence. By partitioning the point cloud into local volumes and using spatial feature extraction via point spatial convolution, SPiKE ensures efficient processing by the Transformer while preserving spatial integrity per timestamp. Experiments on the ITOP benchmark for 3D HPE show that SPiKE reaches 89.19% mAP, achieving state-of-the-art performance with significantly lower inference times. Extensive ablations further validate the effectiveness of sequence exploitation and our algorithmic choices. Code and models are available at: https://github.com/iballester/SPiKE