 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpecializing Underdetermined Action Descriptions Through Plan Projection
Paper and Code
Dec 19, 2018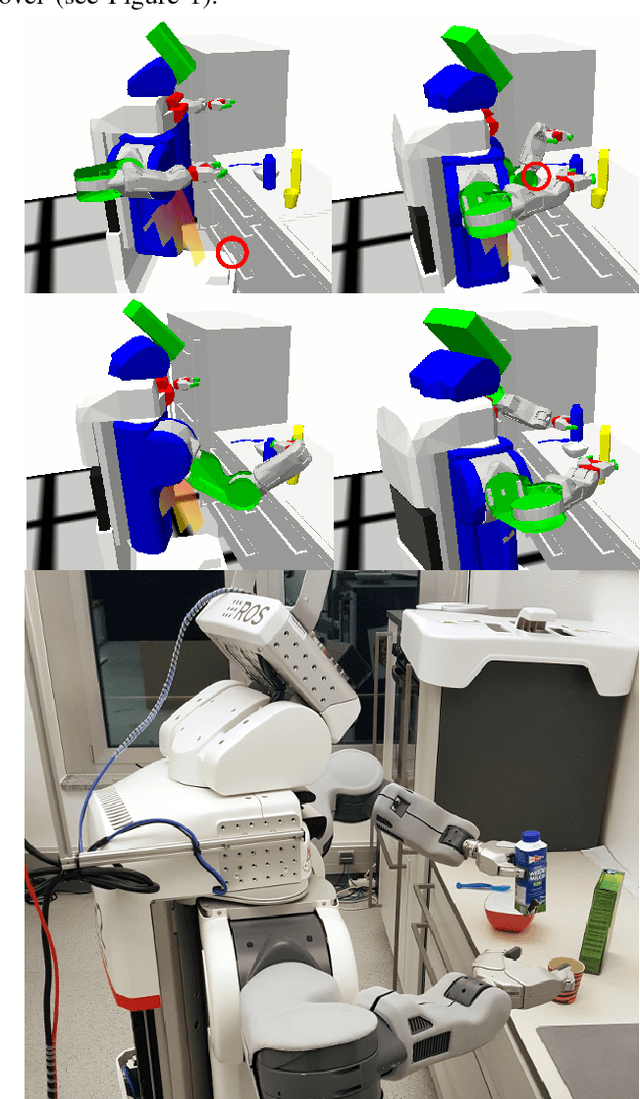
Plan execution on real robots in realistic environments is underdetermined and often leads to failures. The choice of action parameterization is crucial for task success. By thinking ahead of time with the fast plan projection mechanism proposed in this paper, a general plan can be specialized towards the environment and task at hand by choosing action parameterizations that are predicted to lead to successful execution. For finding causal relationships between action parameterizations and task success, we provide the robot with means for plan introspection and propose a systematic and hierarchical plan structure to support that. We evaluate our approach by showing how a PR2 robot, when equipped with the proposed system, is able to choose action parameterizations that increase task execution success rates and overall performance of fetch and deliver actions in a real world setting.