 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpatio-temporal Keyframe Control of Traffic Simulation using Coarse-to-Fine Optimization
Paper and Code
Sep 26, 2022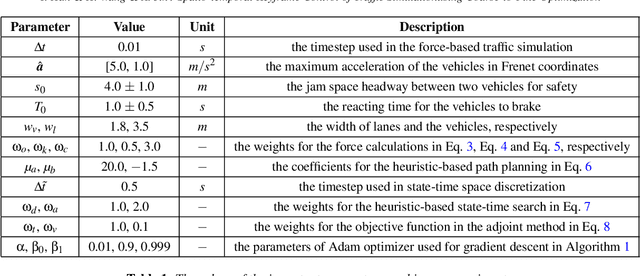
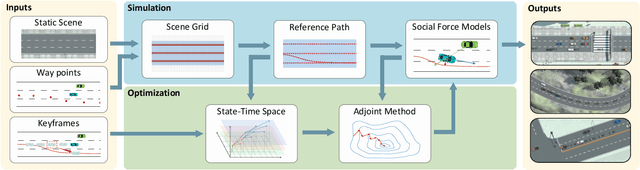
We present a novel traffic trajectory editing method which uses spatio-temporal keyframes to control vehicles during the simulation to generate desired traffic trajectories. By taking self-motivation, path following and collision avoidance into account, the proposed force-based traffic simulation framework updates vehicle's motions in both the Frenet coordinates and the Cartesian coordinates. With the way-points from users, lane-level navigation can be generated by reference path planning. With a given keyframe, the coarse-to-fine optimization is proposed to efficiently generate the plausible trajectory which can satisfy the spatio-temporal constraints. At first, a directed state-time graph constructed along the reference path is used to search for a coarse-grained trajectory by mapping the keyframe as the goal. Then, using the information extracted from the coarse trajectory as initialization, adjoint-based optimization is applied to generate a finer trajectory with smooth motions based on our force-based simulation. We validate our method with extensive experiments.