 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpaRTA - Tracking across occlusions via global partitioning of 3D clouds of points
Paper and Code
Feb 16, 2018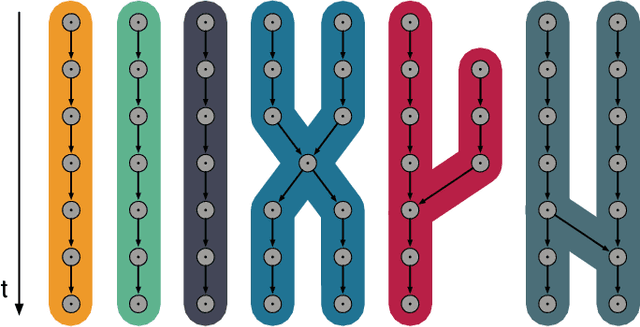
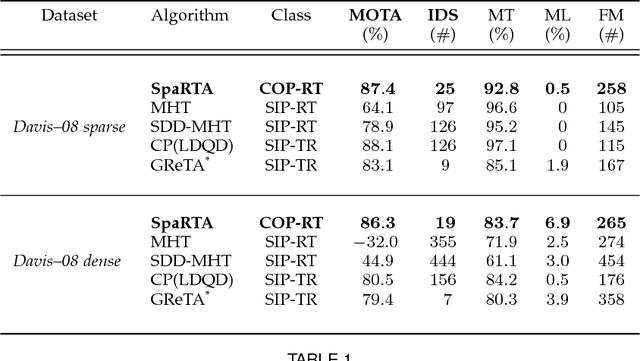
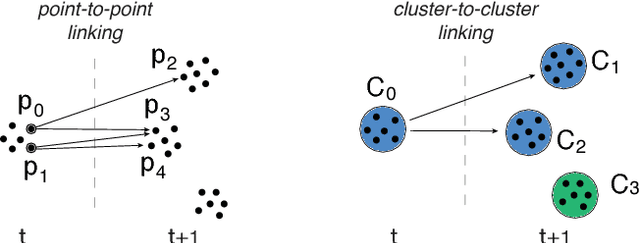
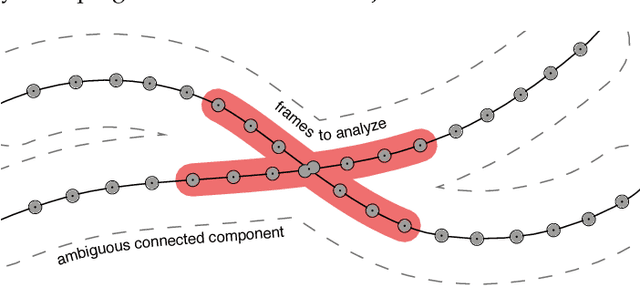
Any 3D tracking algorithm has to deal with occlusions: multiple targets get so close to each other that the loss of their identities becomes likely. In the best case scenario, trajectories are interrupted, thus curbing the completeness of the data-set; in the worse case scenario, identity switches arise, potentially affecting in severe ways the very quality of the data. Here, we present a novel tracking method that addresses the problem of occlusions within large groups of featureless objects by means of three steps: i) it represents each target as a cloud of points in 3D; ii) once a 3D cluster corresponding to an occlusion occurs, it defines a partitioning problem by introducing a cost function that uses both attractive and repulsive spatio-temporal proximity links; iii) it minimizes the cost function through a semi-definite optimization technique specifically designed to cope with link frustration. The algorithm is independent of the specific experimental method used to collect the data. By performing tests on public data-sets, we show that the new algorithm produces a significant improvement over the state-of-the-art tracking methods, both by reducing the number of identity switches and by increasing the accuracy of the actual positions of the targets in real space.