Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSparse SPN: Depth Completion from Sparse Keypoints
Paper and Code
Dec 02, 2022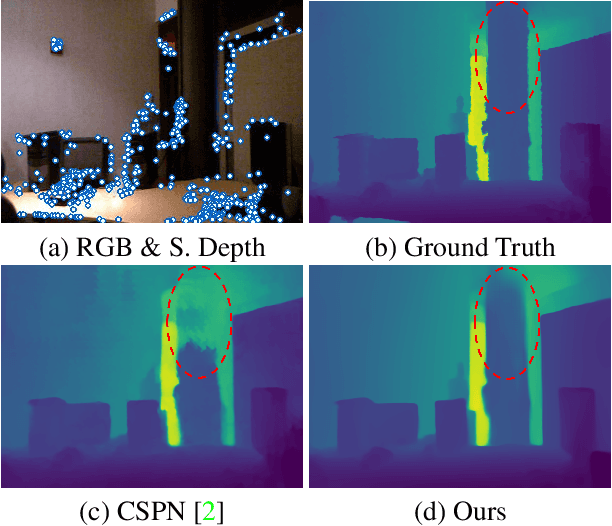
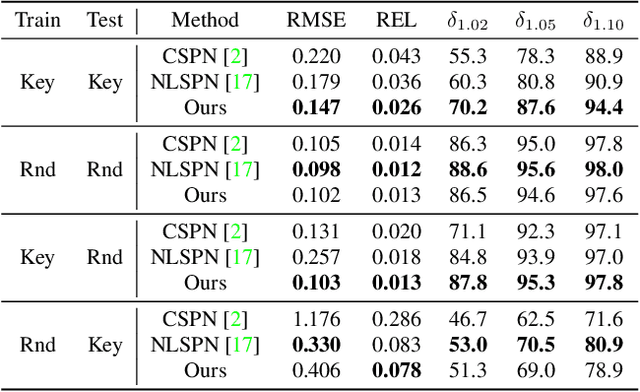
Our long term goal is to use image-based depth completion to quickly create 3D models from sparse point clouds, e.g. from SfM or SLAM. Much progress has been made in depth completion. However, most current works assume well distributed samples of known depth, e.g. Lidar or random uniform sampling, and perform poorly on uneven samples, such as from keypoints, due to the large unsampled regions. To address this problem, we extend CSPN with multiscale prediction and a dilated kernel, leading to much better completion of keypoint-sampled depth. We also show that a model trained on NYUv2 creates surprisingly good point clouds on ETH3D by completing sparse SfM points.
View paper on