Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSparse 3D Point-cloud Map Upsampling and Noise Removal as a vSLAM Post-processing Step: Experimental Evaluation
Paper and Code
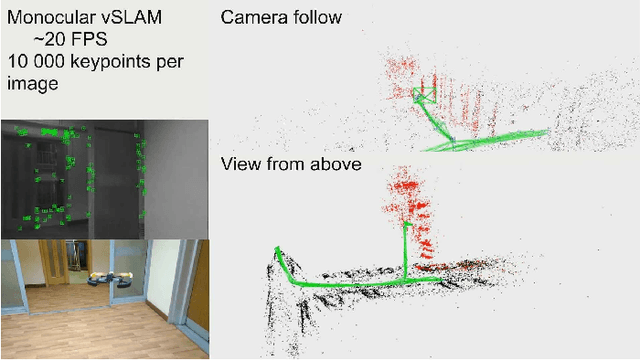
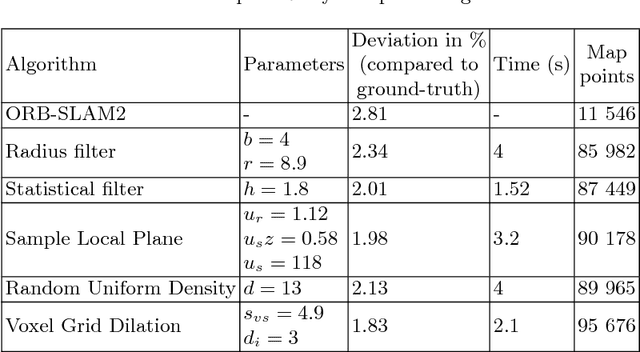
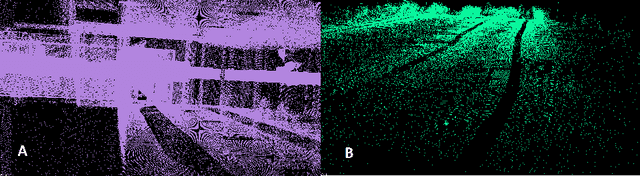
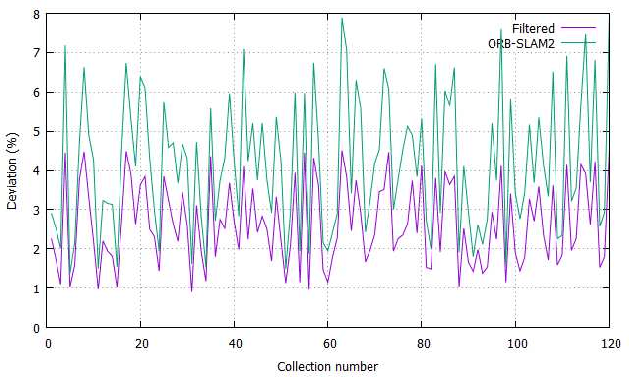
The monocular vision-based simultaneous localization and mapping (vSLAM) is one of the most challenging problem in mobile robotics and computer vision. In this work we study the post-processing techniques applied to sparse 3D point-cloud maps, obtained by feature-based vSLAM algorithms. Map post-processing is split into 2 major steps: 1) noise and outlier removal and 2) upsampling. We evaluate different combinations of known algorithms for outlier removing and upsampling on datasets of real indoor and outdoor environments and identify the most promising combination. We further use it to convert a point-cloud map, obtained by the real UAV performing indoor flight to 3D voxel grid (octo-map) potentially suitable for path planning.
* 10 pages, 4 figures, camera-ready version of paper for "The 3rd
International Conference on Interactive Collaborative Robotics (ICR 2018)"
View paper on