 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSound Abstraction of Probabilistic Actions in The Constraint Mass Assignment Framework
Paper and Code
Feb 13, 2013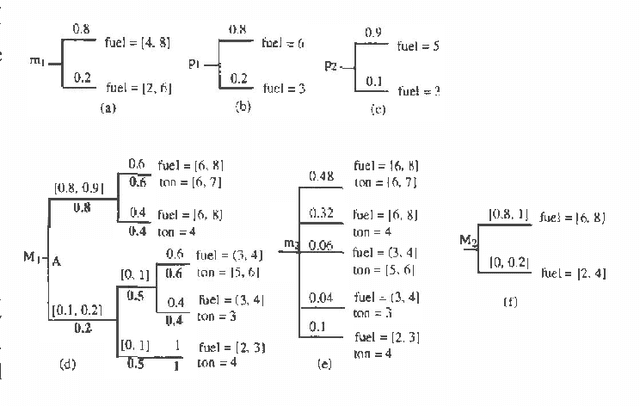
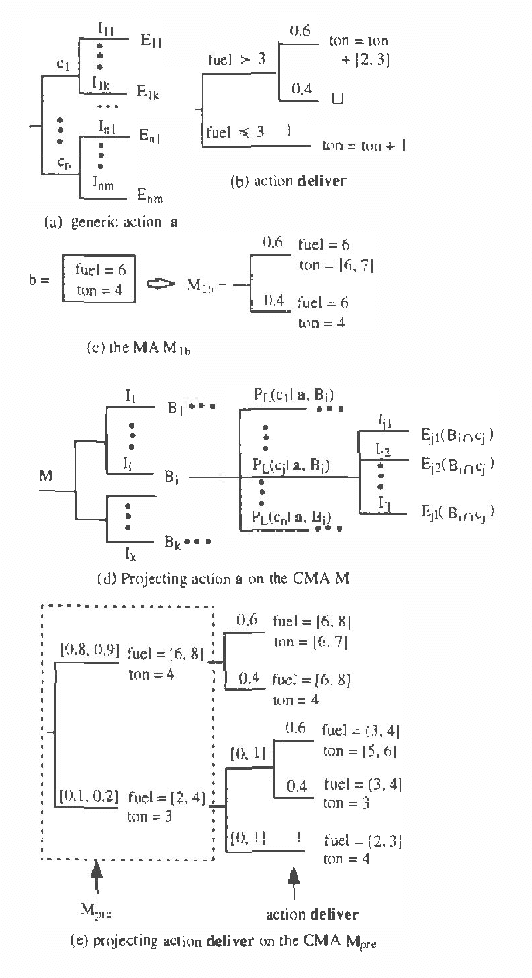
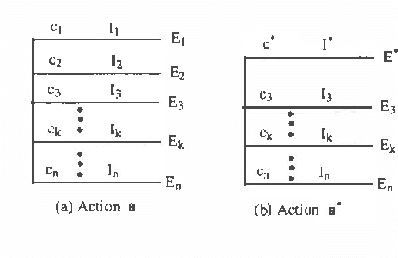
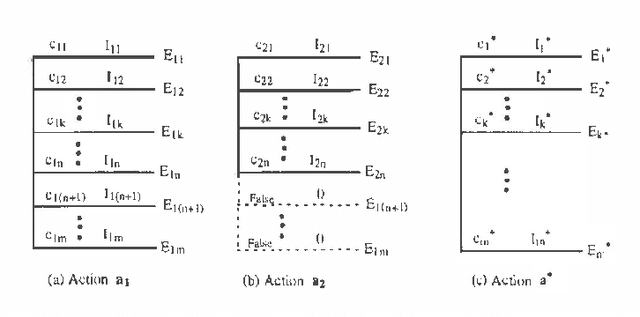
This paper provides a formal and practical framework for sound abstraction of probabilistic actions. We start by precisely defining the concept of sound abstraction within the context of finite-horizon planning (where each plan is a finite sequence of actions). Next we show that such abstraction cannot be performed within the traditional probabilistic action representation, which models a world with a single probability distribution over the state space. We then present the constraint mass assignment representation, which models the world with a set of probability distributions and is a generalization of mass assignment representations. Within this framework, we present sound abstraction procedures for three types of action abstraction. We end the paper with discussions and related work on sound and approximate abstraction. We give pointers to papers in which we discuss other sound abstraction-related issues, including applications, estimating loss due to abstraction, and automatically generating abstraction hierarchies.